Chapter 9 Stationary Points
9.1 Definition of Stationary Points
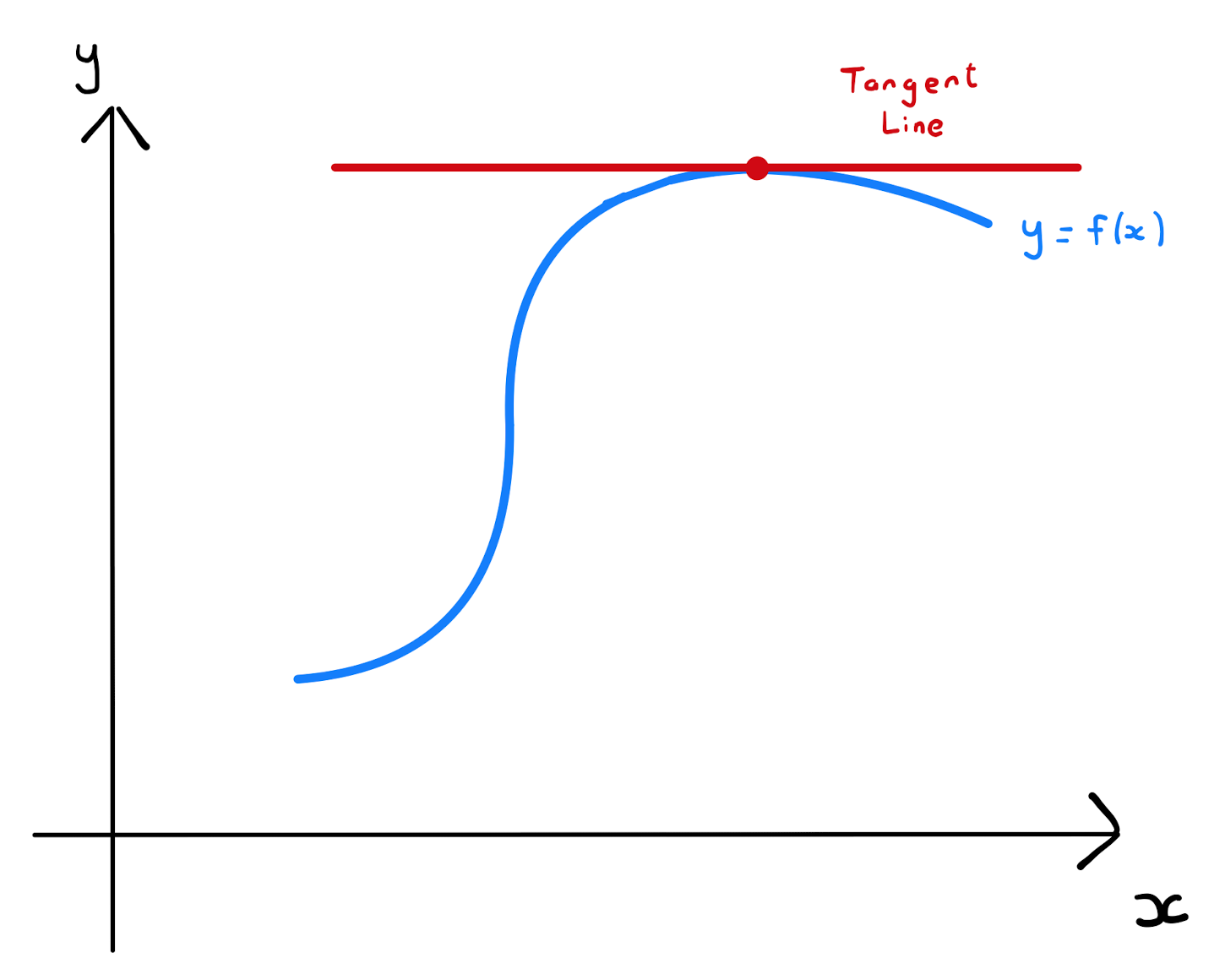
Recall that for a univariate function \(y=f(x)\), a stationary point is a value \(x_0\) for \(x\) at which \(f'(x_0)=0\). Graphically this is a point on the curve at which the tangent line is horizontal.
Now consider a function of two variables \(z=f(x,y)\).
A point \((a,b)\) at which \(f_x (a,b) = f_y (a,b) = 0\) is a stationary point of \(f(x,y)\).
Calculate the stationary points of the function \(f(x,y)=x^2 + y^2\).
Calculating the first order partial derivatives one obtains
So
Therefore \(f\) has a unique stationary point at \((0,0)\).
Calculate the stationary points of the function \(f(x,y)=6 x^2 y -3x^3+ 2y^3 -150y\).
Calculating the first order partial derivatives one obtains
\[\begin{align*}
f_x &= 12xy - 9x^2, \\
f_y &= 6 x^2 +6 y^2 -150.
\end{align*}\]
So
\[\begin{align*}
&f_x = 0, \text{ and } f_y = 0 \\[5pt]
\iff \qquad &12xy - 9x^2 = 0, \text{ and } 6 x^2 +6 y^2 -150 = 0 \\[5pt]
\iff \qquad &3x(4y-3x)=0, \text{ and } x^2 +y^2 =25.
\end{align*}\]
The equation \(3x(4y-3x)=0\) implies either \(x=0\) or \(y=\frac{3}{4}x\). If \(x=0\), the equation \(x^2 +y^2 =25\) becomes \(y^2 = 25\), which has solutions \(y=5\) and \(y=-5\). Therefore there are stationary points at \((0,5)\) and \((0,-5)\).
Alternatively if \(y=\frac{3}{4}x\), the equation \(x^2 +y^2 =25\) becomes \(\frac{25}{16} x^2 = 25\), which has solutions \(x=4\) and \(x=-4\). At \(x=4\), one has \(y = \frac{3}{4} (4) = 3\), and at \(x=-4\), one has \(y=-3\). Therefore there are stationary points at \((4,3)\) and \((-4,-3)\).
In total there are four stationary points \((0,5)\), \((0,-5)\), \((4,3)\) and \((-4,-3)\).
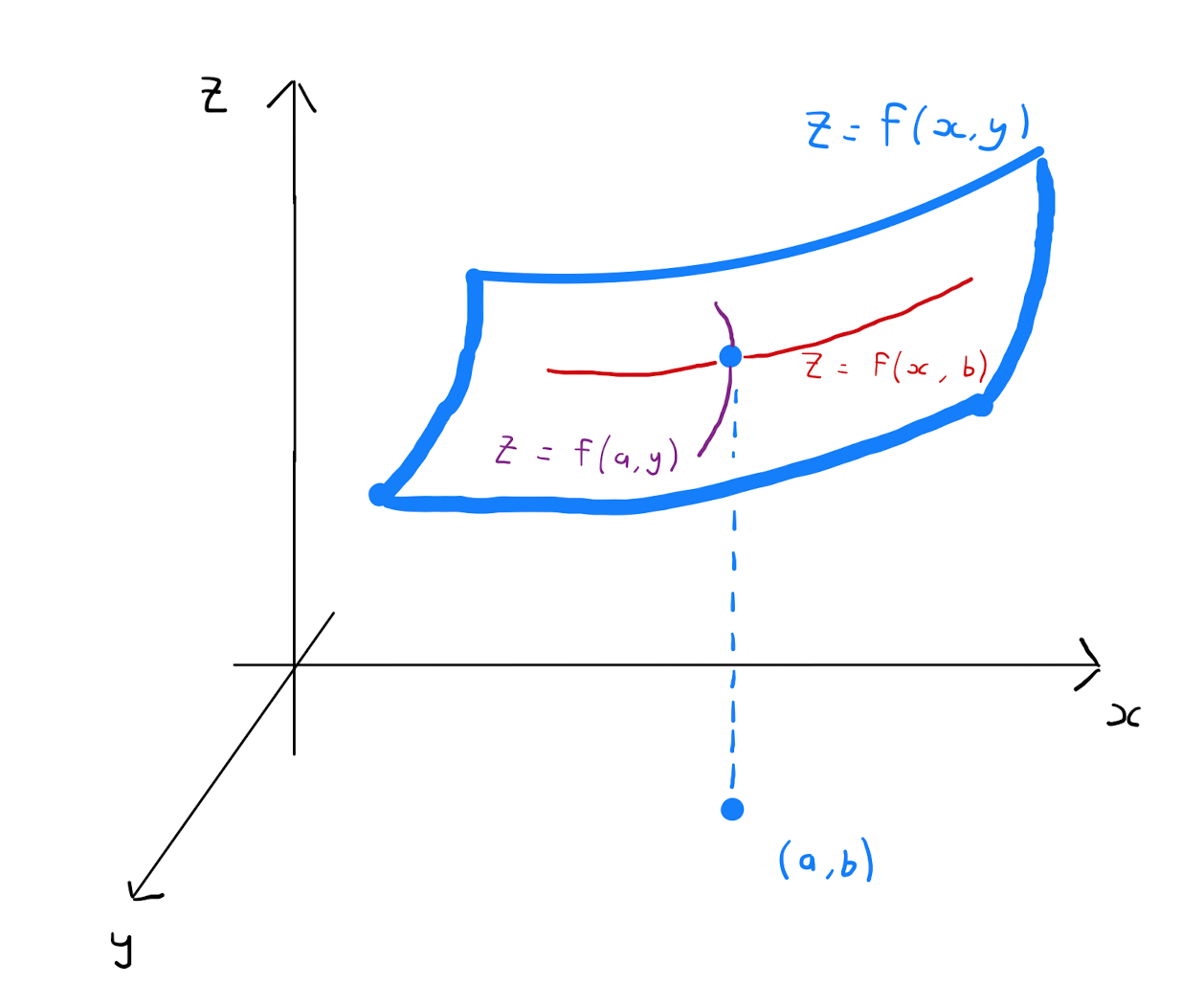
Suppose \((a,b)\) is a stationary point of a function \(f(x,y)\). Graphically one can take two cross-sections of the surface \(z=f(x,y)\) through the planes \(x=a\) and \(y=b\) respectively. This will describes two curves, one given in the \((y,z)\)-plane by the univariate function \(z=f(a,y)\), and the other given in the \((x,z)\)-plane by the univariate function \(z=f(x,b)\).These curves will have stationary points, in the context of univariate functions, at \(y=b\) and \(x=a\) respectively.
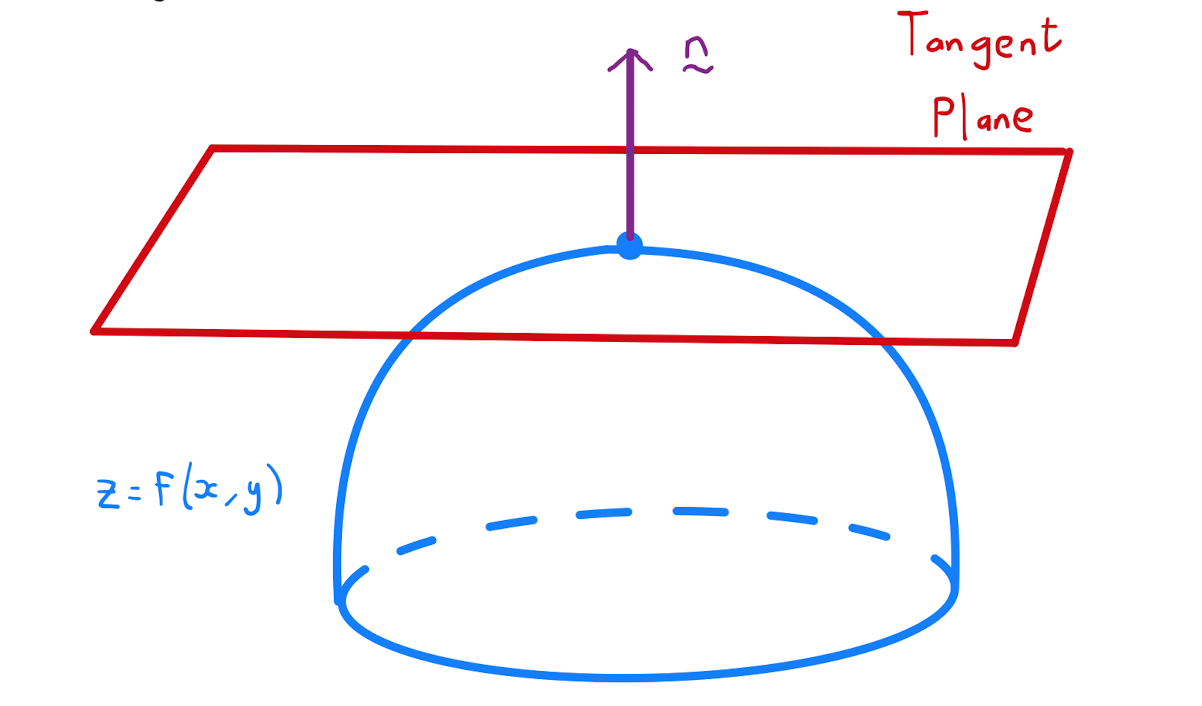
Describing the surface of \(f\) using an implicit function, namely \(F(x,y,z) = z - f(x,y)=0\), allows us to calculate a normal vector as per Section 7.1. Specifically a normal is given by \[\begin{align*} \nabla F &= \left( \frac{\partial F}{\partial x}, \frac{\partial F}{\partial y}, \frac{\partial F}{\partial z} \right) \\ &= \left( -f_x, -f_y, 1 \right) \\ &= (0,0,1). \end{align*}\]
It follows that the tangent plane to \(z=f(x,y)\) is horizontal at a stationary point.
Definition 9.1.1 generalises to any multivariate function.
A stationary point of \(f(x_1, x_2, \ldots , x_n)\) is a point such that \(f_{x_i} =0\), for all \(i = 1,2,\ldots n\).
There are three types of stationary points:
Local maximum;
Local minimum;
Saddle point.
We will study each of these in turn in the following sections.
9.2 Local Maxima and Minima
Let \((a,b)\) be a stationary point of a function of two variables \(f(x,y)\).
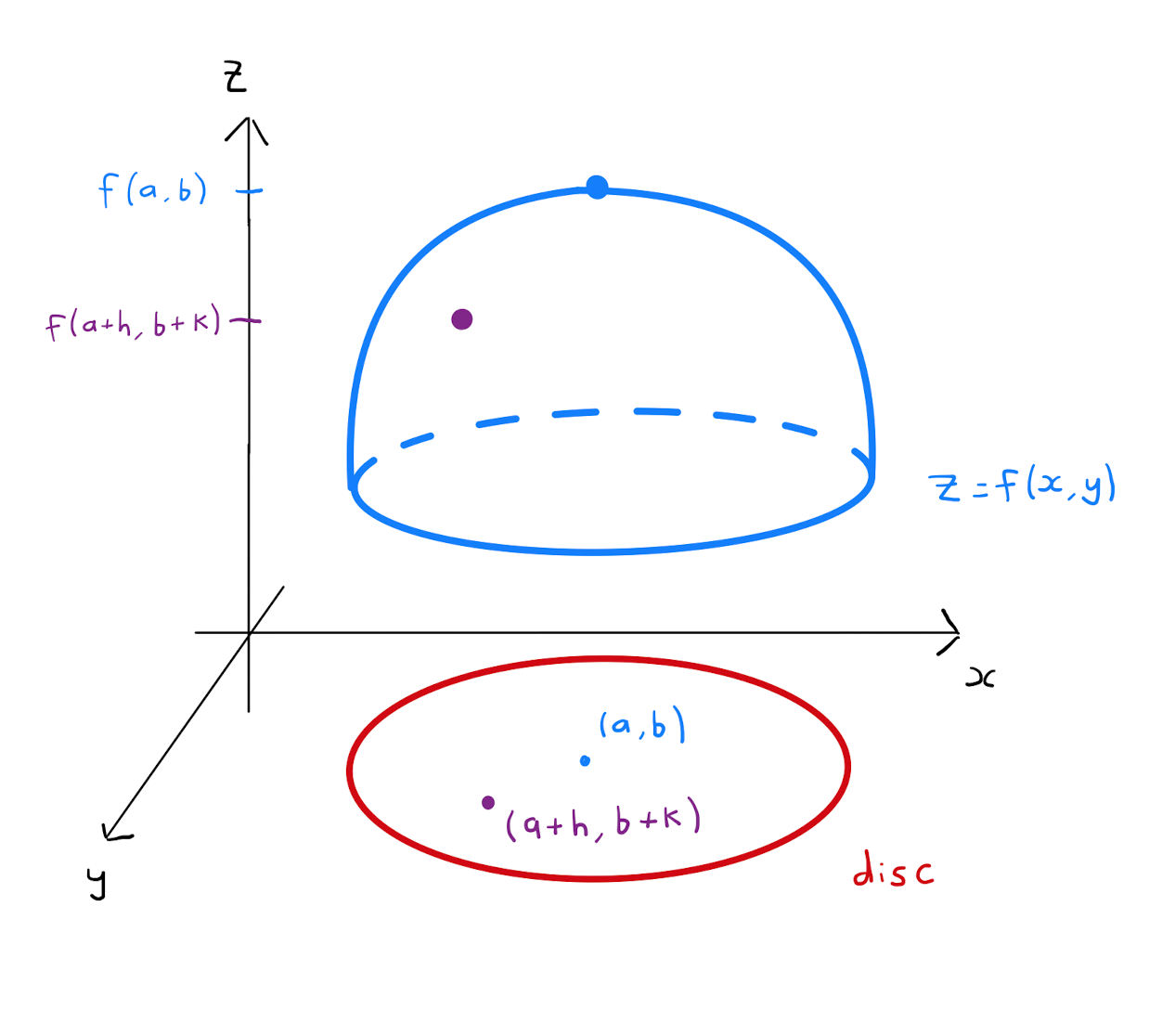
The value \(f(a,b)\) of \(f\) at \((a,b)\) is a local maximum if
where \(D\) is some open disc with center \((a,b)\).
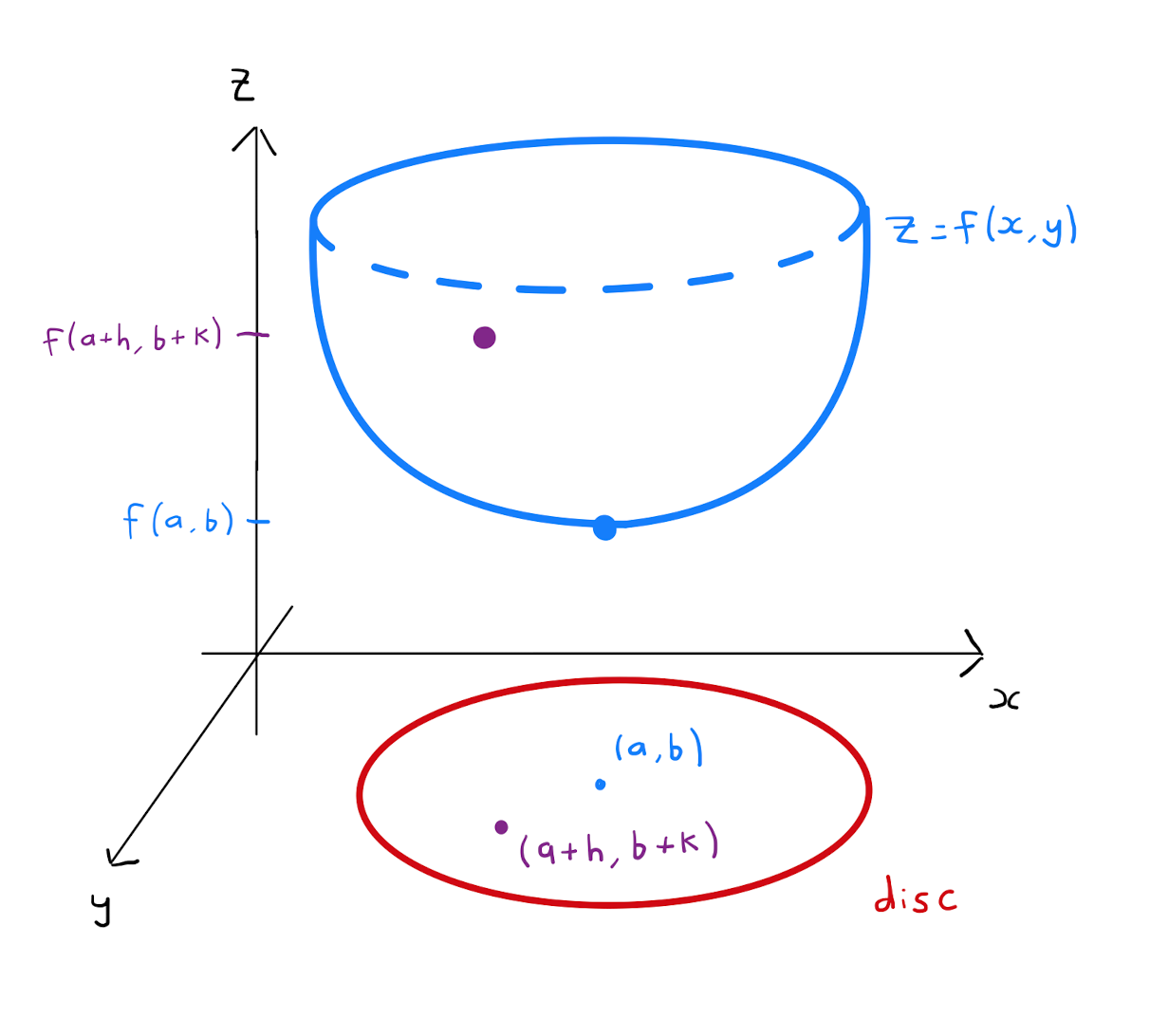
The value \(f(a,b)\) of \(f\) at \((a,b)\) is a local minimum if
where \(D\) is some open disc with center \((a,b)\).
Any size of the disc \(D\) in Definition 8.2.1 and Definition 8.2.2 will do, no matter how small. It is also worth noting the terminology local: there may be other points at which the function is smaller than a local minimum or greater than a local maximum, but these will be a distance away from the stationary point.
Consider the function \(f(x,y) = x^2 + y^2\) from Example 9.1.2. We know there is a unique stationary point at \((0,0)\). Calculate that
Therefore \((0,0)\) is a minimum stationary point.
9.3 Saddle Points
Let \((a,b)\) be a stationary point of a function of two variables \(f(x,y)\).
The point \((a,b)\) is a saddle point of \(f\) if for every disc \(D\) with center \((a,b)\) there exists
a point \((x_1,y_1) \in D\) such that \(f(x_1,y_1) > f(a,b)\);
a point \((x_2,y_2) \in D\) such that \(f(x_2,y_2) < f(a,b)\).
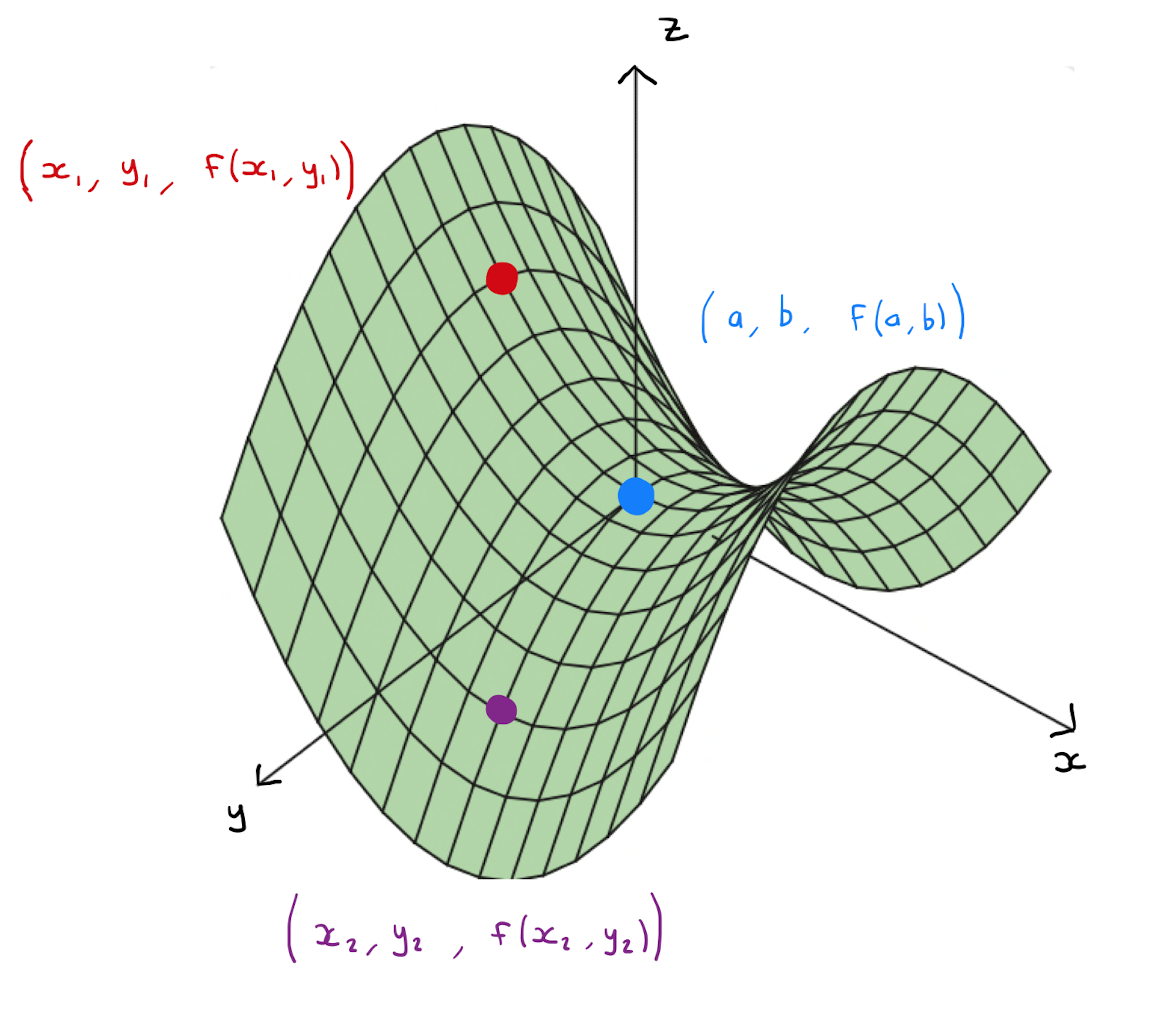
Equivalently a saddle point is a stationary point that is neither a local maximum or a local minimum.
9.4 Classification of Stationary Points
Suppose \(f(x,y)\) has a stationary point at \((a,b)\). How can one tell if this stationary point is a local maximum, a local minimum or a saddle point?
Let \(f\) be a function with continuous second order partial derivatives. The Hessian of \(f\) is \[H(x,y) = f_{xx} f_{yy} - f_{xy}^{2}\]
Let \(f\) be a function with a stationary point at \((a,b)\), and continuous second order partial derivatives in a disc centered at \((a,b)\). Then
If \(H(a,b)< 0\), then \(f\) has a saddle point at \((a,b)\);
If \(H(a,b) >0\) and \(f_{xx}(a,b)>0\), then \(f\) has a local minimum at \((a,b)\);
If \(H(a,b) >0\) and \(f_{xx}(a,b)<0\), then \(f\) has a local maximum at \((a,b)\);
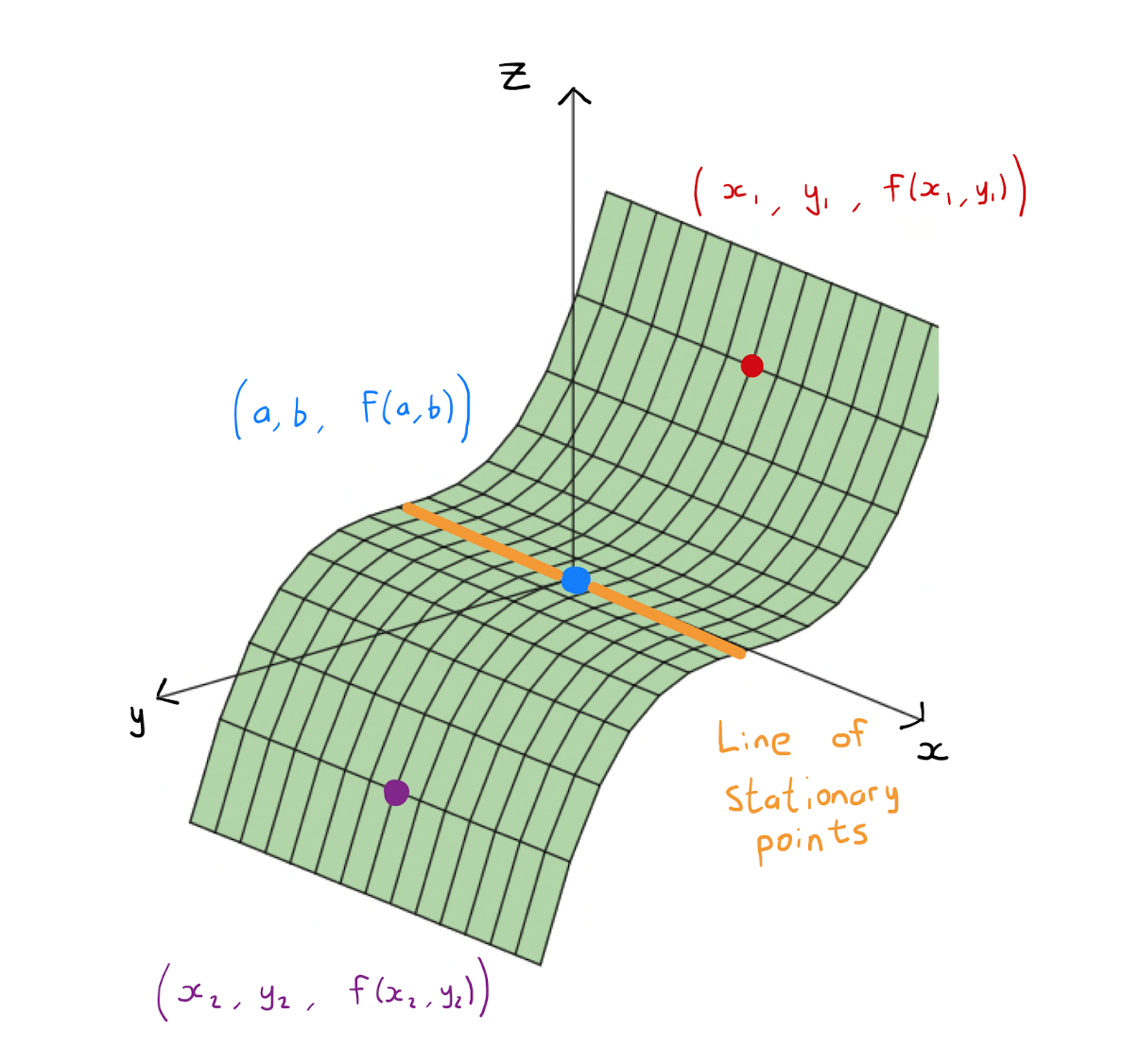
If \(H(a,b) = 0\), then no conclusion can be made about the classification of \((a,b)\).
Let \(h,k\) be suitably small variables so that \((a+h,b+k)\) is contained in the disc centered at \((a,b)\) in which \(f\) has continuous second order partial derivatives
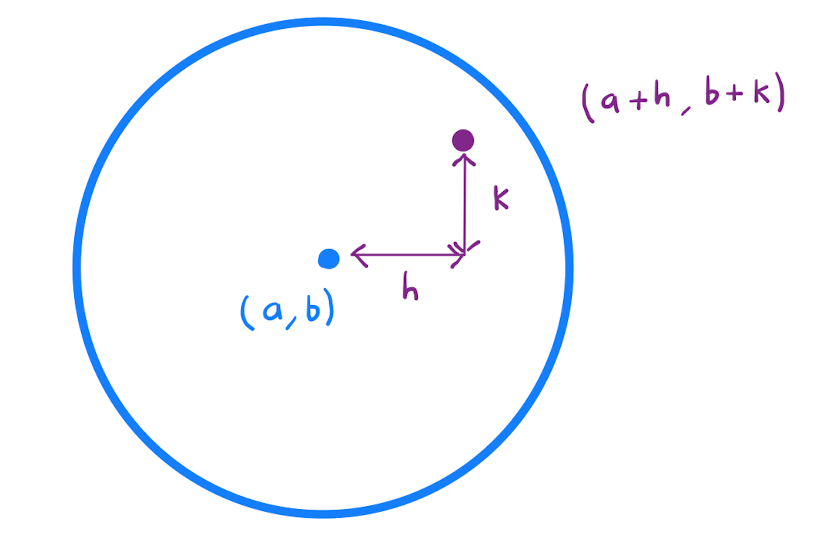
By Taylor’s theorem with \(n=1\), one has \[f(a+h,b+k) = f(a,b) + h f_x (a,b) + k f_y (a,b) + R_1,\] where \[R_1 = \frac{1}{2} \bigg( h^2 f_{xx}(a+th,b+tk) + 2hk f_{xy}(a+th,b+tk) + k^2 f_{yy}(a+th,b+tk) \bigg),\] for some \(t \in [0,1]\). Substituting in that \(f_{x}(a,b) = f_{y}(a,b)=0\) and rearranging, one obtains \[f(a+h,b+k) - f(a,b) = R_{1}.\] Hence the sign of \(R_1\) is key to the classification of the stationary point \((a,b)\) since it determines whether \(f\) increases or decreases away from \(f\). Specifically for a fixed value of \(h,k\):
\(R_1 \left( \frac{h}{k} \right) >0, \quad \implies \quad f(a+h,b+k) > f(a,b)\);
\(R_1 \left( \frac{h}{k} \right) <0, \quad \implies \quad f(a+h,b+k) < f(a,b)\).
Rearranging:
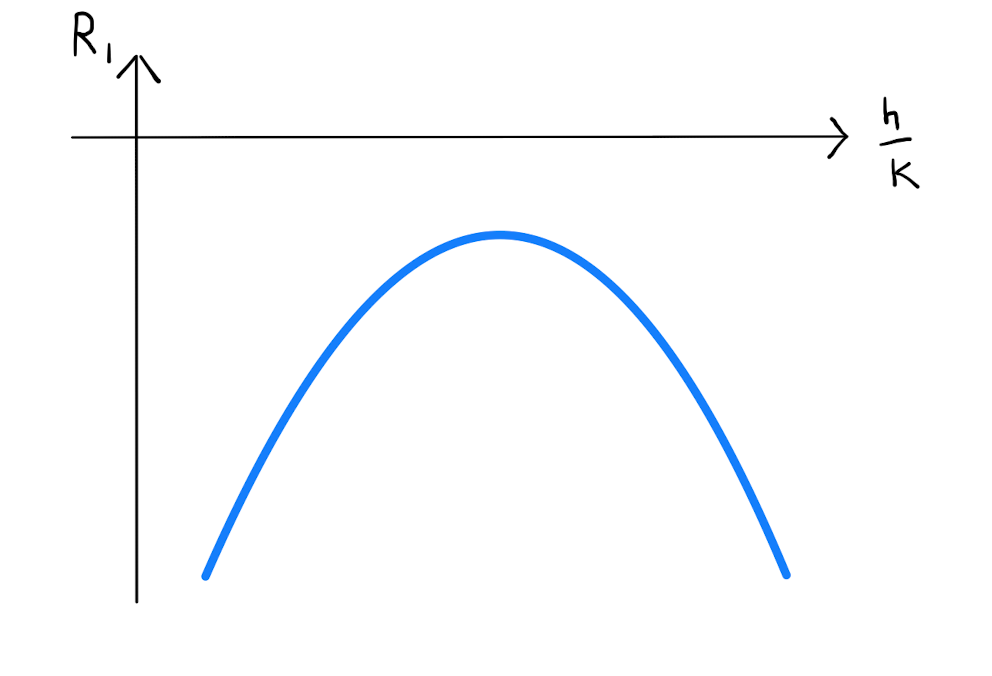
So \(R_1\) can be thought of a quadratic function in the single variable \(\frac{h}{k}\). Since we are only interested in the sign of \(R_1\), and \(\frac{k^2}{2}\) is always positive, it is enough to consider the quadratic function \[\widetilde{R_1} \left( \frac{h}{k} \right) = f_{xx} \left(\frac{h}{k}\right)^2 + 2f_{xy} \frac{h}{k} + f_{yy}\] Quadratic functions are well-understood. In particular for a general quadratic \(Q(x) = ax^2 + bx + c\), the roots of \(Q\) are governed by the discriminant \(\Delta_Q = b^2 -4ac\). With this in mind, define: \[\begin{align*} \Delta &= \Delta_{\widetilde{R_1} \left(\frac{h}{k}\right)} \\ &= \left( 2 f_{xy} \right)^2 - 4 f_{xx} f_{yy} \\ &= 4 \left( f_{xy}^{2} - f_{xx}f_{yy} \right). \end{align*}\]
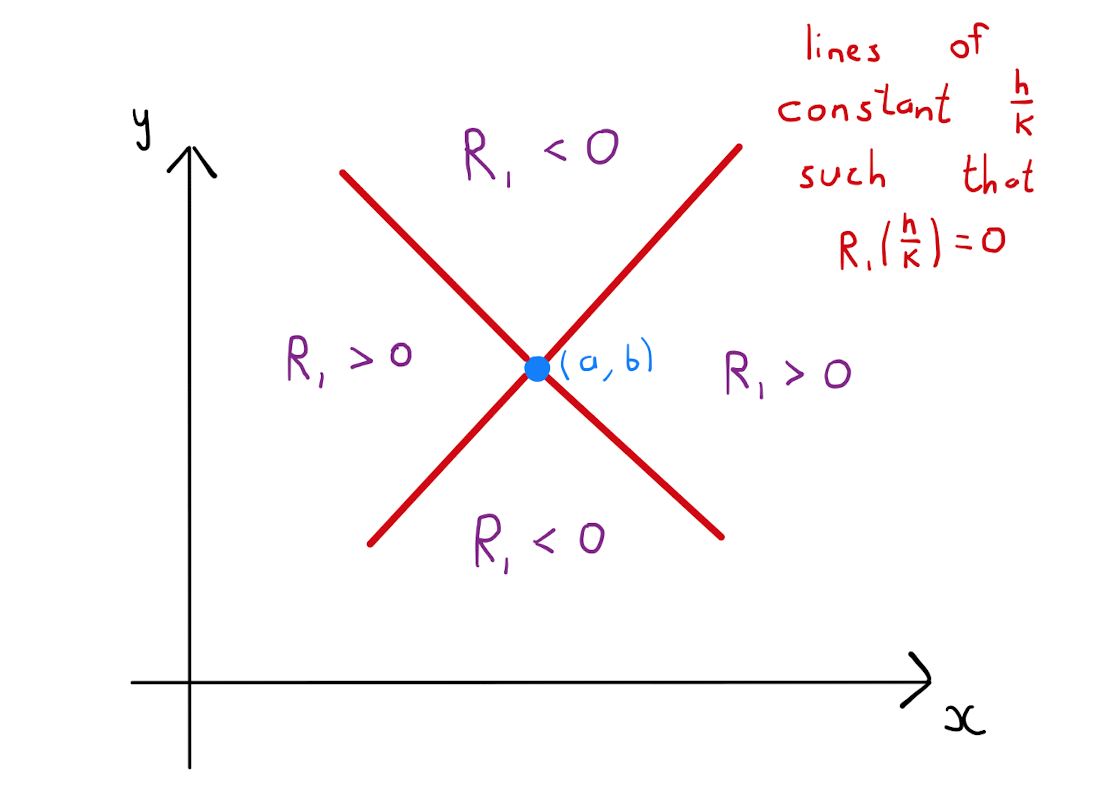
Suppose that \(\Delta>0\). Then \(\widetilde{R_1}\) has two real roots.
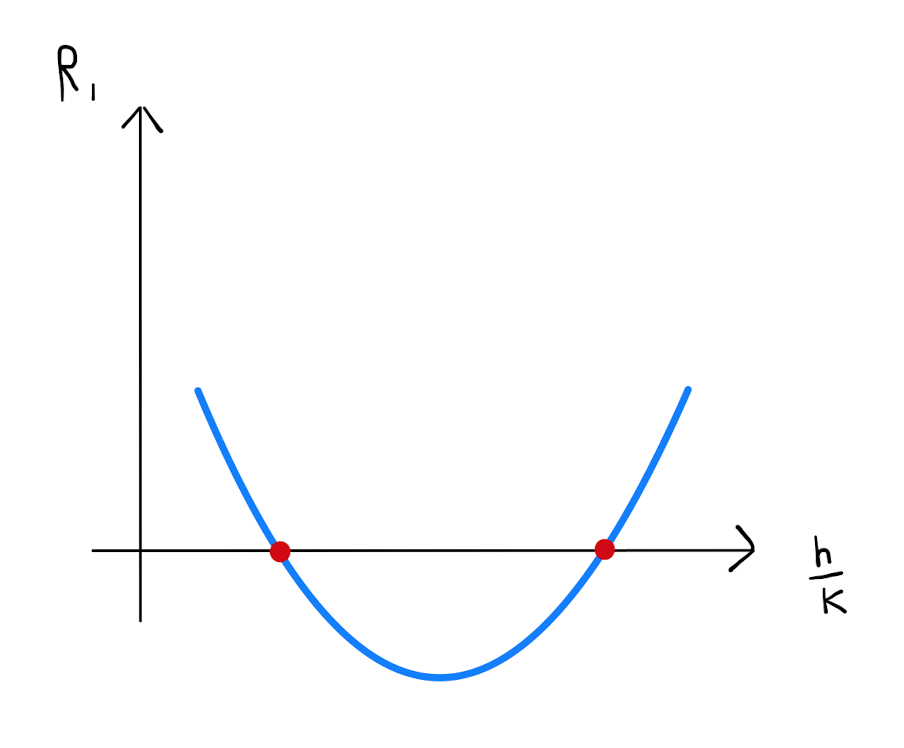
Specifically there are two distinct values for \(\frac{h}{k}\) for which \(R_1=0\). At both of these roots \(R_1\) changes sign, and \((a,b)\) is therefore a saddle point.
Alternatively suppose \(\Delta <0\), that is that \(\widetilde{R_1}\) has no real roots. Then \(R_1\) will always have the same sign, be that positive or negative. Therefore \((a,b)\) is either a local minimum or a local maximum.
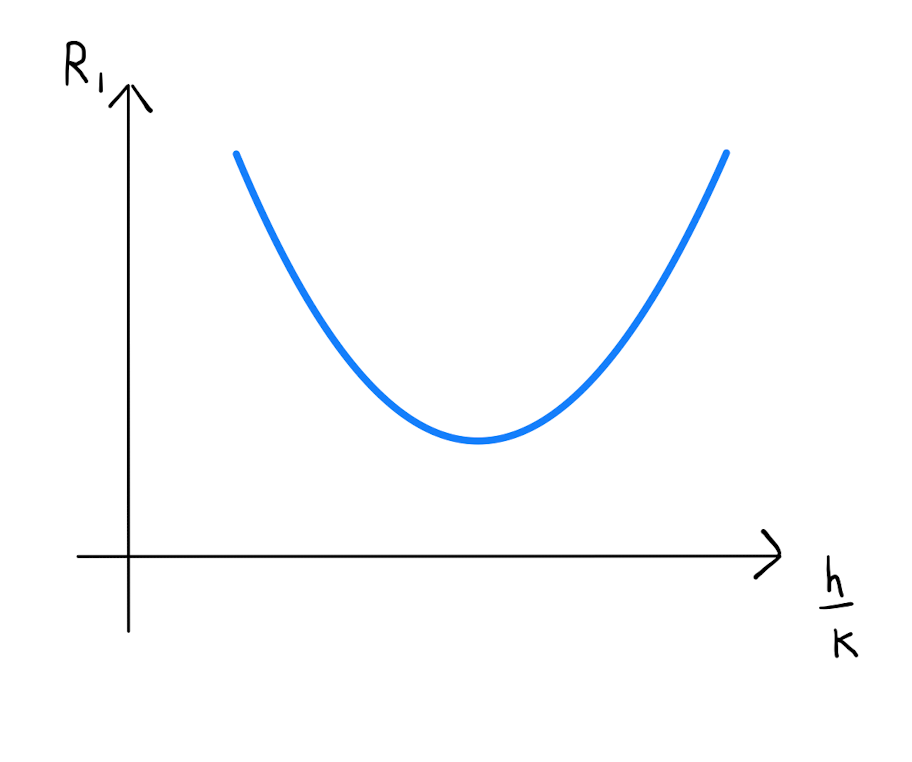
Since in this case the sign of \(R_{1}\) does not change, it can be found by looking at a single point. Specifically when \(k=0\), we have \(R_{1} = \frac{h^2}{2} f_{xx}\). Hence
\(f_{xx} >0 \quad \implies \quad R_{1} > 0 \quad \implies \quad (a,b)\) is a local minimum;
\(f_{xx} <0 \quad \implies \quad R_{1} < 0 \quad \implies \quad (a,b)\) is a local maximum.
Noting that \(\Delta = -4 H\) gives the desired result.
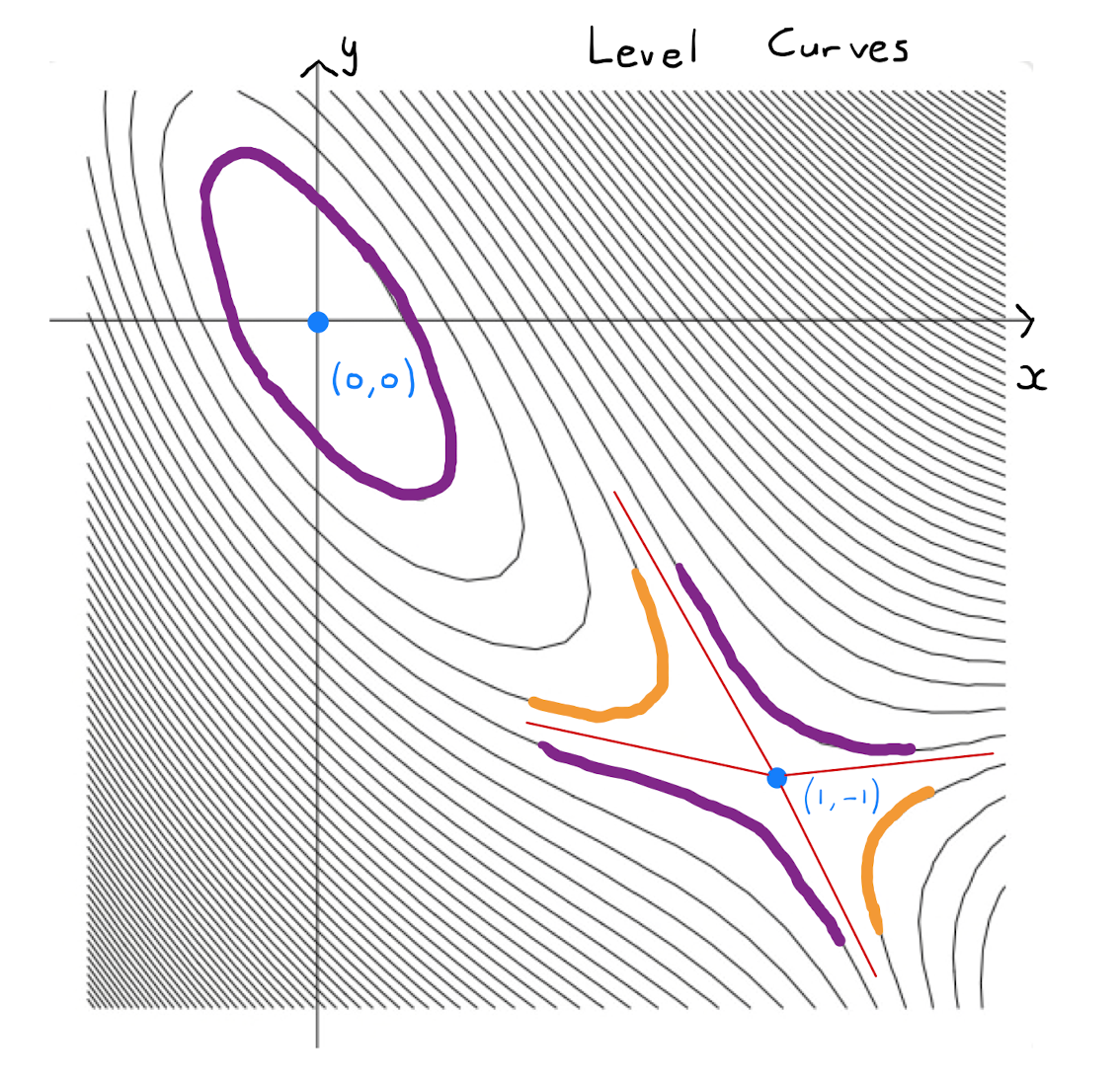
Find and classify the stationary points of
\[f(x,y) = 6x^2 - 2 x^3 + 3y^2 + 6xy.\]
Equating the two first order partial derivatives of \(f\) to zero, one obtains
\[\begin{align*}
f_x &= 12x -6x^2 + 6y = 0 \tag{$\star$}, \\
f_y &= 6y + 6x = 0 \tag{$\star \star$}.
\end{align*}\]
Substituting \((\star \star)\) into \((\star)\) gives
When \(x=0\), equation \((\star \star)\) dictates \(y=0\), and when \(x=1\), equation \((\star)\) dictates \(y=-1\). Therefore \(f\) has two stationary points: \((0,0)\) and \((1,-1)\).
Calculating the second order partial derivatives of \(f\), one obtains:
The Hessian of \(f\) is then given by
By Theorem 9.4.2, the stationary points are classified as follows:
\(H(0,0) =36>0\) and \(f_{xx} =12 >0, \quad \implies \quad\) the stationary point \((0,0)\) is a local minimum;
\(H(1,-1) =-36<0, \quad \implies \quad\) the stationary point \((1,-1)\) is a saddle point.