2.1 Sensores industriales
Para poder controlar automáticamente un proceso de fabricación es necesario disponer de información sobre el estado del proceso. Esto se puede hacer midiendo diferentes magnitudes físicas que intervienen en el mismo. Pese a poder recibir diferentes nombres (detector, transductor, sonda), el sensor es el nombre más utilizado en control de autómatas para referirse al dispositivo que mide una magnitud física. En general estas magnitudes físicas no tienen por qué ser eléctricas, por lo que se utilizan transductores para convertir a señales eléctricas (Fig. 2.2.
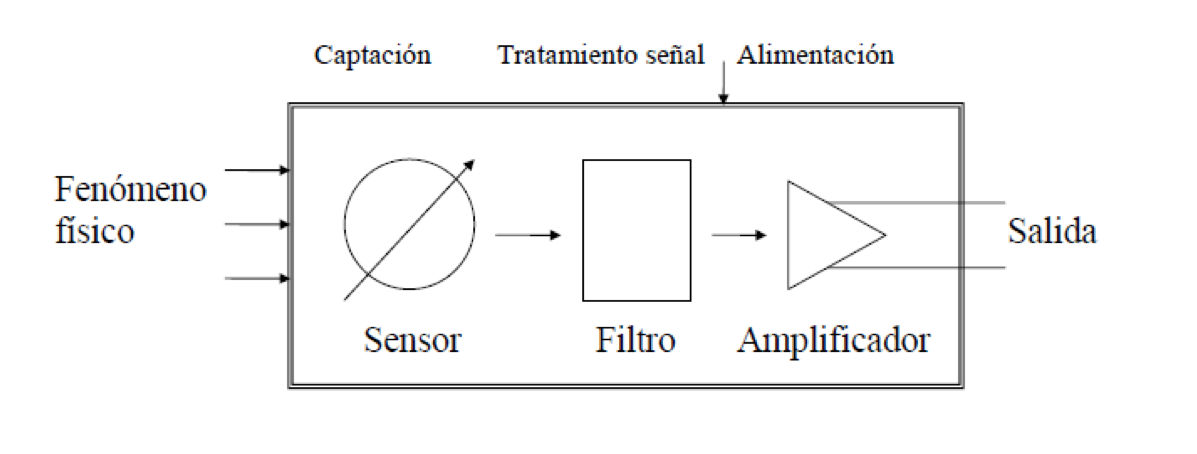
Figura 2.2: Transductor
Un transductor convierte una señal no eléctrica en eléctrica, en la cual alguno de sus parámetros (nivel de tensión, corriente, frecuencia) contiene información sobre la magnitud medida. Puesto que es necesario acoplar la salida de este dispositivo transductor al sistema de control, puede ser necesario efectuar filtrado y amplificación de la señal eléctrica en el llamado circuito acondicionador o de acondicionamiento.
2.1.1 Características de los sensores
A continuación, se presentan algunas características que definen el comportamiento de los sensores. En las siguientes definiciones, se utiliza la variable X para referirse al objeto físico que se quiere medir (por ejemplo, la temperatura a la que se encuentra una habitación), y la variable Y para referirse a la medida realizada por el sensor (la temperatura medida por el sensor térmico utilizado).
Según el régimen de funcionamiento del sensor distinguimos dos conjuntos de características: estáticas (cuando se tiene un régimen permanente en la variable a medir o ésta varía de forma lenta) y dinámicas (relativas a un régimen transitorio de la variable a medir).
Características Estáticas:
- Campo de medida: rango de valores del objeto físico (X) que puede medir el sensor.
- Sensibilidad: ratio dY/dX
- Resolución: mínimo cambio de X detectable en Y
- Umbral: mínimo valor de X con salida no nula en Y
- Precisión: error de medida máximo esperado (si el sensor es preciso, el error relativo entre varias medidas es pequeño)
- Exactitud: diferencia entre el valor real X y el valor medido Y (si el sensor es exacto, la medida de Y estará en un entorno cercano al valor real de X)
- Repetitibilidad: máxima desviación entre valores de salida obtenidos al medir varias veces la misma entrada con el mismo sensor y en idénticas condiciones ambientales.
- Linealidad: Proporcionalidad entre X e Y
- Histéresis: Diferentes valores de Y para un mismo X en función de la evolución de X (ascendente o descendente)
Es frecuente confundir precisión y exactitud. En la Fig. 2.3 se puede apreciar la diferencia.
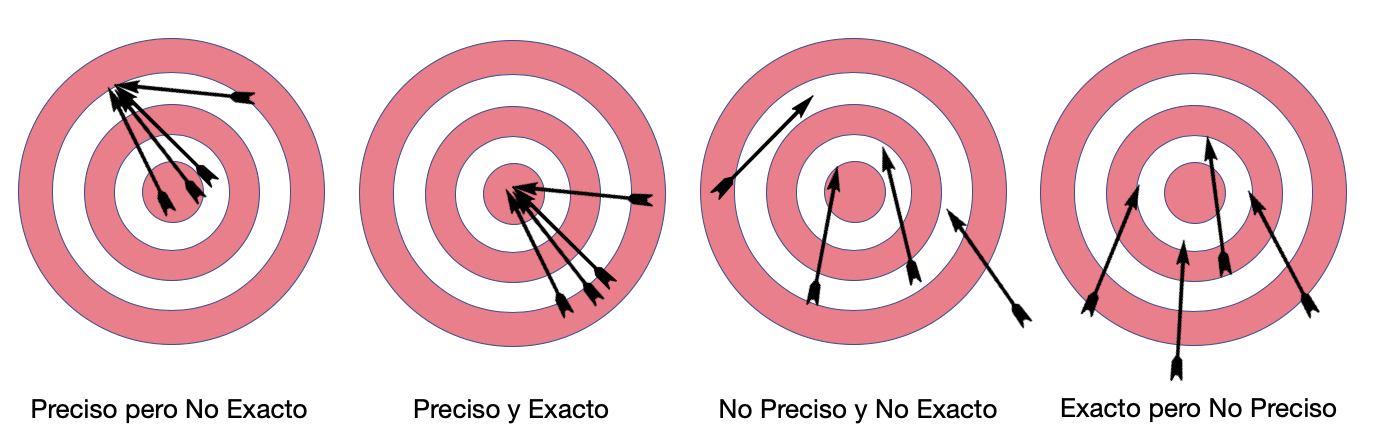
Figura 2.3: Precisión VS Exactitud
Características dinámicas:
- Velocidad de respuesta (tiempo de subida / de retardo): capacidad para que la señal de salida siga a la señal de entrada sin retraso.
- Respuesta en frecuencia: capacidad del sensor para seguir las variaciones de la señal de entrada a medida que aumenta la frecuencia.
2.1.2 Clasificación de los sensores
Los sensores se pueden clasificar de acuerdo con un conjunto de características diferentes y no excluyentes:
- Según principio físico de funcionamiento: final de carrera, termoresistivos, capacitivos, inductivos, etc.
- Según principio de funcionamiento: activo/pasivo. En los sensores activos, la magnitud física a medir proporciona la energía suficiente para generar la señal de salida (ej. Termoeléctrico, fotoeléctrico, magnetoeléctrico, piezoeléctrico). Los sensores pasivos necesitan una fuente de alimentación externa (ej. Resistivos-Termorresistivo, Capacitivos, Inductivos…).
- Según señal eléctrica generada: analógica/digital. Un sensor analógico puede tomar cualquier valor dentro de unos determinados márgenes. En el caso de las señales analógicas es imprescindible el uso de circuitos de acondicionamiento. Los sensores digitales toman un número finito de valores.
- Según variable física medida: presencia/proximidad, presión, temperatura, humedad, velocidad, caudal, etc.
- Según rango de valores que proporciona: de medida/todo-nada. Los sensores de medida proporcionan a la salida todos los valores posibles correspondientes a cada valor de la entrada (ej. Sensor analógico termorresistivo). Los sensores todo/nada, utilizados en sistemas discretos, detectan si la magnitud está por encima de determinado valor. Su salida solo puede tomar 2 valores diferentes. Son ejemplos de este tipo de sensores los que indican si se ha producido presencia/ausencia de un objeto en las proximidades del sensor.
2.1.3 Tipos de sensores
2.1.3.1 Interruptores de acción mecánica
Existen ciertos interruptores que se accionan mediante contacto físico y fuerza suficiente sobre cierta parte del mismo (normalmente una palanca). Su uso está muy extendido debido a su coste reducido, sin embargo, también limitado a ciertas aplicaciones debido a ciertas desventajas:
- Una vida operativa más corta por el desgaste del rozamiento del sensor.
- Un problema de rebote de la señal en conmutación.
Algunas de las aplicaciones de estos sensores son la de desconectar límites de carrera, controlar avance de elementos en máquinas herramienta, robots, etc. En particular, el sensor final de carrera se asocia en la industria a un sensor de contacto que detecta el final del desplazamiento de un objeto móvil en un proceso industrial. Estos sensores suelen ser muy robustos y suelen estar diseñados para trabajar en ambientes agresivos. Se pueden apreciar diversos tipos en la Fig. 2.4.
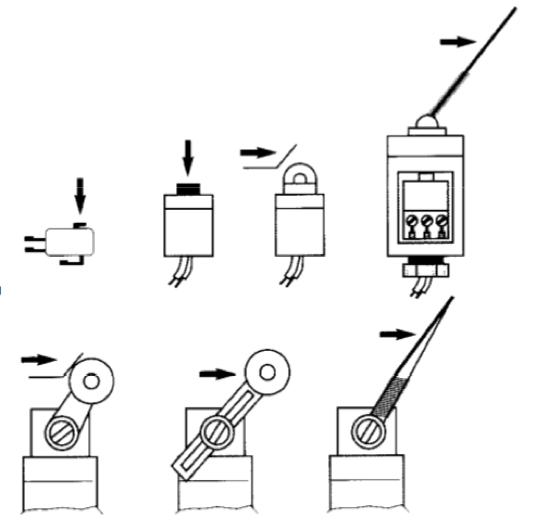
Figura 2.4: Interruptor de acción mecánica
2.1.3.2 Sensores de proximidad sin contacto
La detección (sin contacto) de la presencia de un objeto depende de diversos factores como, por ejemplo, el material del objeto a detectar o la distancia a la que debe ser colocado para ser detectado. De acuerdo con el principio físico en el que se basa su funcionamiento pueden ser optoelectrónicos (accionados por luz), inductivos (de acción magnética), capacitivos (de acción capacitiva) y ultrasónicos (de acción ultrasónica).
Pueden tener salida todo/nada normalmente abierta (NO) o normalmente cerrada (NC) y estar implementados con relés o transistores.
Sensores inductivos de proximidad
El sensor inductivo detecta la presencia de cualquier objeto de material conductor sin necesidad de contacto físico, y su funcionamiento se basa en la influencia sobre algunos metales y semiconductores del campo magnético generado por la bobina del sensor.
Además de la bobina, el sensor de proximidad inductivo se compone de un circuito oscilador LC del que forma parte, un rectificador (que proporciona tensión continua a partir de alterna), un comparador (que proporciona dos tensiones distintas en función de la presencia/ausencia del objeto, por ejemplo, un disparador Schmitt) y una etapa de salida (por ejemplo, tipo relé), tal y como se muestra en la Fig. 2.5.
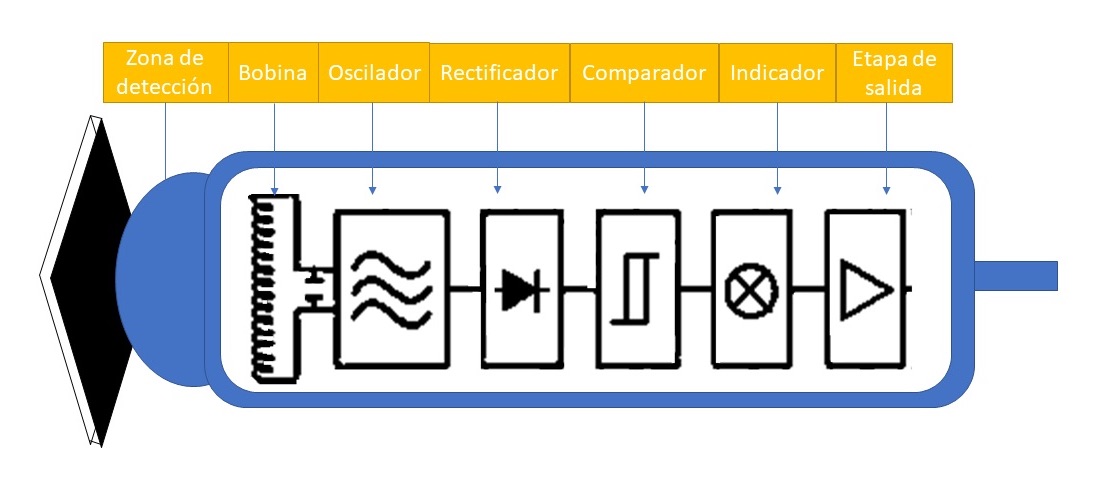
Figura 2.5: Sensor inductivo: estructura
Cuando se hace pasar una corriente por una bobina, se genera un flujo magnético \(\phi\) que depende de la inductancia de la bobina, la cual a su vez depende de las características físicas (longitud, número de espiras, sección) y la permeabilidad del núcleo. La permeabilidad mide la capacidad de conducción del campo magnético de un material, y es igual al producto de permeabilidad en el vacío y permeabilidad relativa. Si a la bobina se le acerca un material ferromagnético (cuya permeabilidad relativa es muy superior a 1), las líneas de fuerza del flujo magnético variable cortan al material y hace que se induzcan corrientes de Foucault. Dichas corrientes crean un campo magnético que se opone al de la bobina, y esto tiene un efecto de reducir la inductancia cambiando levemente la frecuencia de oscilación y reduciendo la amplitud de las oscilaciones.
El circuito oscilador está pensado para tener máxima amplitud de oscilación sin presencia de objeto. Si hay presencia de objeto, se produce una disminución de amplitud de oscilación por transferencia de energía debido a la corriente de Foucault. Si se detecta una disminución de amplitud por debajo de un nivel de operación, la salida se activa (ver Fig. 2.6).
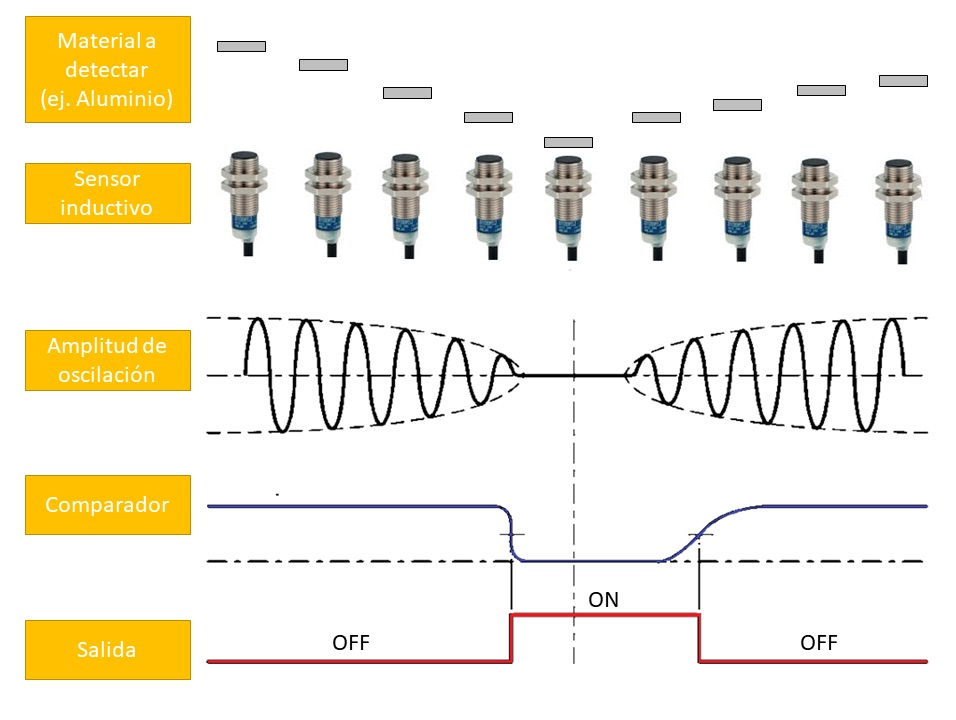
Figura 2.6: Sensor inductivo: funcionamiento
El fabricante especifica la distancia teórica máxima a la que el sensor detecta el objeto patrón (cuadrado de acero de tamaño específico dependiente de las propiedades del sensor). En general, la distancia de detección de este tipo de sensores es pequeña (1-50mm). La distancia a la cual el objeto es detectable depende de la permeabilidad del material, a menor permeabilidad menor distancia. Estos sensores funcionan peor si el material es paramagnético (permeabilidad magnética relativa superior a la unidad), e incluso puede que no se produzca la detección si el material es diamagnético (permeabilidad relativa inferior a la unidad).
Resumiendo, este tipo de sensores se pueden utilizar cuando se requiere detectar sin contacto la presencia de objetos metálicos ubicados en máquinas herramienta, robots o líneas de producción. El sensor se activa como un interruptor al detectar objeto, y genera una señal eléctrica (libre de rebote a diferencia de los interruptores mecánicos) que puede utilizarse en el proceso, por ejemplo, para la conmutación de electroválvulas.
El aspecto físico de este sensor se muestra en la Fig. 2.7. También se muestra un sensor capacitivo (que se verá en la siguiente sección) puesto que son muy parecidos10.

Figura 2.7: Ejemplo de sensor inductivo (izquierda) y capacitivo (derecha).
Sensores capacitivos de proximidad
Estos sensores se basan en la interacción producida entre el objeto a detectar y el campo electrostático que genera el propio sensor. El funcionamiento es similar al caso inductivo, pero ahora el sensor es un condensador.
La capacidad de un condensador depende de la distancia entre electrodos, su área y la permitividad dieléctrica que representa la capacidad del material de polarizarse ante la presencia de un campo eléctrico. La permitividad dieléctrica es igual al producto de la permitividad del vacío y de la permitividad relativa del material dieléctrico que separa las placas del condensador.
Cuando un objeto se aproxima al sensor y entra al campo electrostático de los electrodos, la capacidad del condensador se incrementa. La variación de la capacidad se detecta mediante un circuito oscilador del que forma parte. Debido a un aumento de capacidad, la amplificación del oscilador se incrementa haciendo al oscilador entrar en oscilación. Cuando la amplitud de oscilación supera un cierto nivel ante la presencia de un objeto, el estado del sensor cambia. Si el objeto se aleja, la amplitud del oscilador disminuye hasta conmutar al estado original (sin oscilación). El sensor también se compone de un circuito rectificador, un comparador y una etapa de salida (igual que el sensor inductivo), tal y como se muestra en la Fig. 2.8. Existe otra configuración en la que el propio objeto a detectar es el electrodo principal.
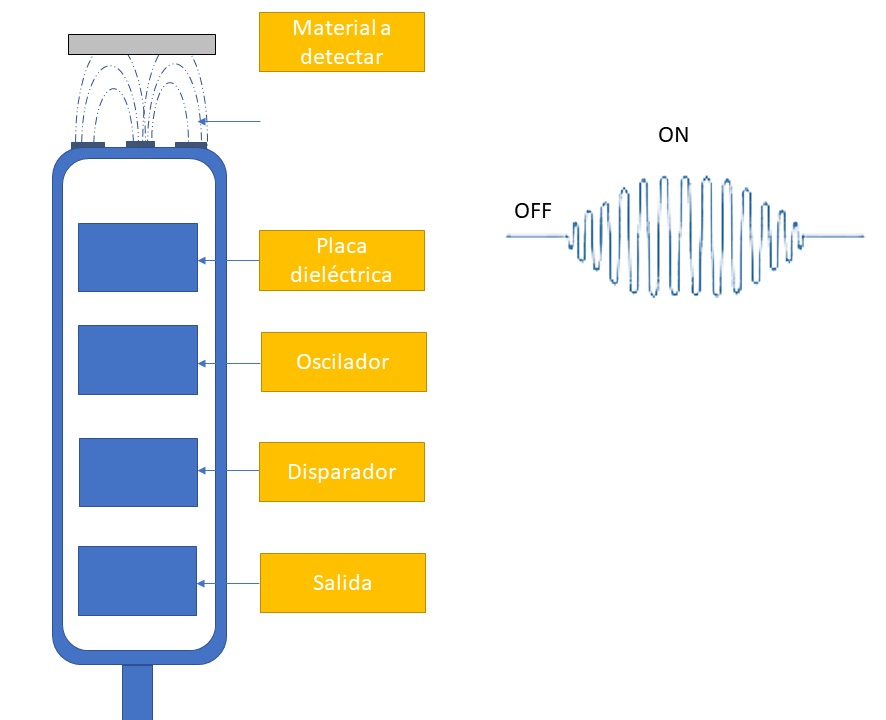
Figura 2.8: Sensor capacitivo: funcionamiento
Este tipo de sensores detectan tanto materiales metálicos como no metálicos, como el papel, vidrio o tela. Los materiales cuyos valores de constante dieléctrica sean más altos serán más fáciles de detectar que aquellos con valores más bajos. Por ejemplo, el agua, que tiene una constante de 80, será fácilmente detectable, mientras que el sensor no será sensible al aire que tiene una constante de 1. En este sentido, los materiales con altas constantes dieléctricas pueden ser detectados a través de las paredes de envases cuya constante dieléctrica sea menor. Por lo tanto, se pueden utilizar para el control de llenado de recipientes o control de fluidos a través de barreras. También son utilizados para muchos dispositivos con pantalla táctil, como teléfonos móviles, ya que el sensor percibe la pequeña diferencia de potencial entre membranas de los dedos eléctricamente polarizados de una persona.
Como desventajas, es importante destacar que los sensores capacitivos tienen una distancia de detección corta (en torno a 1-30mm) que varía según el material que deba detectar, y al mismo tiempo son extremadamente sensibles a los factores ambientales.
Sensores optoelectrónicos de proximidad
Son sensores que detectan la presencia de un objeto mediante fenómenos relacionados con la luz. También se conoce a estos sensores como fotocélulas, sensores ópticos o detectores fotoeléctricos.
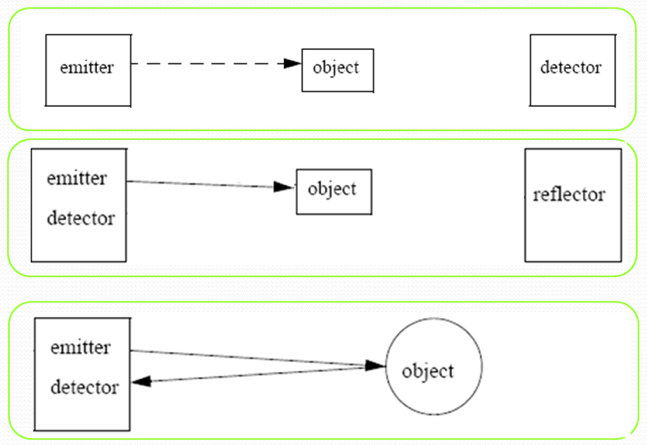
Figura 2.9: Sensor óptico: tipos
En cada sensor existe un emisor que genera un haz de luz (en el espectro visible o infrarrojo) y un receptor que puede recibir o no el haz de luz emitido o recibirlo modificado, según la presencia del objeto. Estos sensores se pueden clasificar, atendiendo al método de detección utilizado y la disposición de los elementos emisor y receptor, como (ver Fig. 2.9):
- Fotocélulas de barrera de luz: el emisor y receptor están separados y enfrentados, y el objeto bloquea el haz de luz generado por el emisor.
- Fotocélulas de reflexión: el emisor y receptor comparten carcasa, y el haz de luz generado por el emisor se refleja hasta llegar al receptor. El haz de luz se puede reflejar en un espejo o en el propio objeto. Cuando existe reflexión en el espejo, el receptor identifica la presencia de un objeto si no se recibe el haz generado por el emisor y reflejado por el espejo. Dependiendo de la configuración del sensor, se puede utilizar para detectar objetos con diferente grado de transparencia. Para que se dé la reflexión en el objeto, este debe contar con unas características mínimas de reflectividad. Según la luz se refleja en el espejo en múltiples direcciones o en una única dirección, hablamos de sensores de reflexión difusa o definida.
El emisor normalmente manda una señal de luz modulada, es decir, la fuente de luz recibe impulsos de corriente que generan impulsos de luz. De esta manera se puede aplicar mayor potencia instantánea a la fuente de luz, y se facilita la amplificación de la señal alterna en el receptor, por lo que se logra un sensor de mayor alcance. Además, el emisor incluye una lente para conseguir luz colimada a su salida.
La fuente de luz suele ser un diodo de infrarrojos (de arseniuro de galio, GaAs) o luz visible mediante LEDs (Light Emitting Diode) de color rojo o verde.
El receptor suele incluir una lente a su entrada para concentrar el haz de luz emitido en un elemento fotosensible (como el fotodiodo, el fototransistor o el fotodarlington), el cual ve modificado alguno de sus parámetros característicos con la incidencia de la luz. Además, pude filtrar y amplificar la señal (en base a la frecuencia de pulsos generados en el emisor) para evitar la luz que no procede del emisor.
Estos sensores pueden tener la activación cuando hay luz o cuando no la reciben. El circuito del receptor activa o desactiva la salida según si la señal recibida supera un determinado umbral. Dada una distancia de trabajo y unas condiciones ideales, el margen con el cual la señal supera un cierto umbral se conoce como exceso de ganancia. Cuando el ambiente no es ideal, por ejemplo, ante la presencia de cierta suciedad, será más difícil detectar la señal, por lo tanto, el exceso de ganancia nos da una idea de la capacidad del sensor de superar pérdidas de señal.
Una posible aplicación de estos sensores sería el conteo de botellas, detección de taladros, control de altura en una línea de producción o implementar una barrera óptica.
Sensores ultrasónicos de proximidad
Estos sensores basan su funcionamiento en las señales sonoras de frecuencia superior al valor audible por el ser humano, 20KHz, los ultrasonidos (normalmente se limita a un rango de frecuencias de 20KHz-250KHz).
Constan de un elemento emisor y otro elemento receptor de ultrasonidos utilizando como medio de transmisión normalmente el aire (Fig. 2.10). La manera de realizar estos elementos es utilizando el efecto piezoeléctrico en materiales: la presión sobre el material hace que se produzca un movimiento de cargas por lo que aparece una diferencia de potencial entre las caras del material (el receptor se basa en la deformación producida por señales de presión del aire). Este efecto es reversible, por lo que si se aplica una diferencia de potencial aparece una deformación del material (el emisor produce señales de presión de aire de la misma frecuencia que la señal de voltaje aplicada).
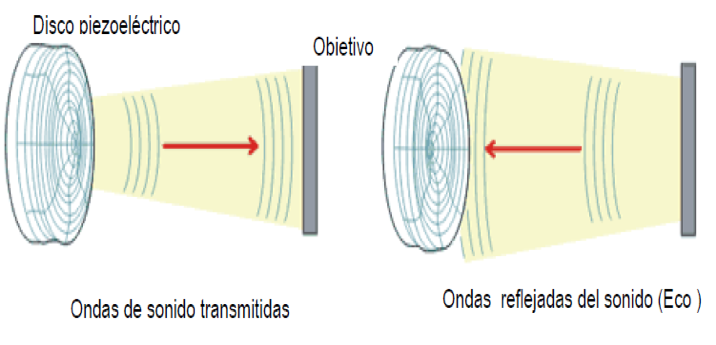
Figura 2.10: Sensor de ultrasonidos: tipos
Un tipo de sensores ultrasónicos son los sensores detectores de eco, que no solo detectan la presencia de un objeto si no que miden la distancia al mismo. Para ello el receptor y el emisor están situados en la misma carcasa. El emisor transmite un tren de impulsos que es reflejado en el objeto y el eco es detectado por el receptor. Un circuito electrónico mide el tiempo que se tarda en recibir el eco, y conocida la velocidad del sonido en el aire (aproximadamente 340m/s) se determina la distancia al objeto.
Mediante estos sensores se pueden detectar líquidos, sólidos o materiales de distintas forma y colores que tengan unas mínimas características de reflexión de los ultrasonidos.
Las limitaciones de este tipo de sensores son su carácter paraxial (la trayectoria de las ondas debe ser perpendicular al sensor) y su dependencia con el medio ambiente ( ya que tendrá cierta influencia en la velocidad del sonido).
Algunos ejemplos de aplicaciones de los ultrasonidos son la medida de nivel en recipientes, la medición de alturas, el control anticolisión, la medición de fisuras en materiales, etc.
Interruptor de lengüeta (Reed Swicht)
Un interruptor de lengüeta o reed switch (Fig. 2.1111) es un interruptor eléctrico activado por un campo magnético generado por un imán permanente o una bobina. Está formado por un par de contactos ferrosos encerrados al vacío dentro un tubo de vidrio, de manera que cuando los contactos están normalmente abiertos se cierran en la presencia de un campo magnético; cuando están normalmente cerrados se abren en presencia de un campo magnético.

Figura 2.11: Sensor de lengüeta o reed
Un uso muy extendido se puede encontrar en los sensores de las puertas y ventanas de las alarmas antirrobo, el imán va unido a la puerta y el interruptor de lengüeta al marco.
2.1.3.3 Sensores de posición
La posición y el avance de objetos en los procesos de fabricación son datos que normalmente se desean conocer para controlar el proceso. Según el margen de distancias de trabajo (puede variar desde centésimas de milímetros hasta decenas de metros) se utilizan sensores basados en diferentes principios físicos.
Codificadores de posición optoelectrónicos: Encoders
Estos sensores están basados en la detección de señales de luz que atraviesan un disco que posee n pistas concéntricas, cada una con zonas opacas y transparentes alternas asignadas a los números 0 y 1 respectivamente. A cada pista le corresponde un emisor de luz y un receptor sensible a la luz, de manera que, si dividimos el disco en 2n sectores, cada uno se puede codificar con un bit por pista cuyo valor depende de la medida del receptor. La señal recibida pasa a un circuito cuya salida se encuentra a un nivel de tensión correspondiente a un nivel lógico si recibe luz, y al contrario si no hay señal luminosa.
Los codificadores de posición pueden ser absolutos (cuando miden la posición respecto a una referencia) o incrementales (cuando miden un incremento de la posición). El principal inconveniente de estos últimos es que pierden datos si se desconecta la alimentación.
Potenciómetro
Este sensor consiste en una resistencia (de geometría lineal o angular) cuyo valor varía en función del movimiento de un contacto, por lo tanto, al aplicarle corriente, la tensión de salida también variará. El principal inconveniente es el desgaste por rozamiento del contacto y la resistencia.
2.1.4 Criterios de selección
Algunas de las variables a tener en cuenta a la hora de elegir el sensor adecuado para una aplicación determinada son:
- Magnitud a medir
- Tipo de información: discreto/continuo
- Uso de la medida (resolución, precisión, fidelidad…)
- Acople con otros dispositivos
- Condiciones ambientales (criterios de seguridad)
- Precio