Kapitel 2 Das moderne Antriebspaket
2.1 Bestimmungsgrössen bei der Auswahl
Abbildung 2.1 gibt einen Überblick über die Bestimmungsgrössen bei der Auswahl eines Stromrichterantriebs. Drei grosse Kostenblöcke sollten bei der Entscheidungsfindung zur Beschaffung ausgewogen berücksichtigt werden:
- Errichtungskosten
- Betriebskosten
- Umweltschutz
Grosse Kapazitäten bei Halbleiter- und Maschinenherstellern und der Kampf um Marktanteile führen zu verstärktem Kostendruck auf die Mitbewerber Kostenvorteile der Serienfertigung werden weitergegeben und verbessern laufend die Einstandspreise der Drehstromantriebe gegenüber der traditionellen Gleichstromlösung, die an den Kostensenkungen kaum noch teilnimmt. Zusätzlich lassen sich Vorteile finden, wenn durch die geringeren Abmessungen unterhalb ca. 200 kW der Drehstrommaschinen kostbarer Konstruktionsplatz für andere Maschinenkomponenten frei wird. Lange Jahre wurde wenig auf die Kosteneinsparung beim Betrieb der Maschinen geachtet, obwohl über die Möglichkeiten zur Einsparung mehrfach berichtet wurde. Neuerdings rücken auch diese Kosten stärker ins Blickfeld, besonders die Wartungskosten, wegen der steigenden Personalaufwendungen. Hier bieten die neuen mikroprozessorgesteuerten Stromrichter mit eingebauten Diagnoseroutinen Vorteile, die man günstig zur Kostensenkung nutzen kann. Wartungsintervalle und Stillstandszeiten können so leicht erfasst und besser angepasst werden, die vorbeugende Wartung gewinnt an Bedeutung. Der Wartungsaufwand für den Stromwenderapparat der Gleichstrommaschine fällt zunächst bei solchen allgemeinen Vergleichen stark ins Gewicht jedoch kann eine pauschale Betrachtung ohne Berücksichtigung einzelner Details leicht zu einer falschen Entscheidung führen.
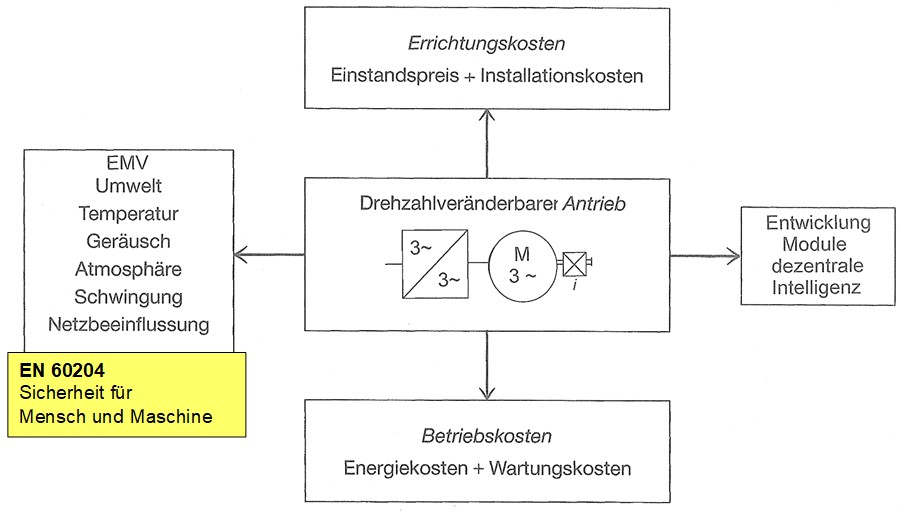
Abbildung 2.1: Verschiedene Aspekte bei der Wahl des Antriebssystems
Zwei wesentliche Umweltschutzaspekte gewinnen zunehmend an Bedeutung:
- Geräuschemission
- Netzrückwirkungen. (power factor compensation)
Die Geräuschemission des Antriebspakets (Stromrichter, elektrische Maschine und angekuppelte Arbeitsmaschine) kann durch die Eigenschaften der Gesamtkonstruktion deutlich beeinflusst werden. Der Anteil und das unvermeidbare Spektrum an Oberschwingungen in den Betriebsgrössen von gleich- und sinusförmigen Strömen, sollte möglichst gering sein. 16-kHz-Ultraschallpulsung oder andere geeignete Massnahmen sind bei Gleichstromstellern und Frequenzumrichtern anzustreben, um einen Teil der lästigen Geräusche zu eliminieren. Die Rückwirkung der eingesetzten Stromrichter auf das speisende öffentliche Netz nimmt stark zu, da jeder Stromrichter ein Oberschwingungsgenerator ist; netzfreundliche Stromrichterschaltungen gewinnen so an Bedeutung. Der erfreulichen Reduzierung der Einschaltstromspitzen beim Maschi-nenanlauf durch den Stromrichter, besonders bei Drehstromasynchronmaschinen, stehen starke Netzrückwirkungen durch Oberschwingungen bei Strom und Spannung gegenüber, deren Grenzen in ent-sprechenden Vorschriften beschrieben sind. Obwohl die Rahmenvorschriften eingehalten werden, kann die starke Zunahme der Zahl der eingesetzten Stromrichterantriebe zu Störungen der Aggregate untereinander führen.
2.2 Mikroprozessoren sorgen für Wirtschaftlichkeit
Die Kostenstrukturen unterliegen dem laufenden Wandel, den der Anwender beachten muss, um die Langzeitentwicklung der Kosteneinzelposten am Einsatzplatz seiner Antriebe richtig zu erfassen. Die neue Generation der mikroprozessorgesteuerten Stromrichter bietet sich hierfür förmlich an, da diese Geräte über eine Schnittstelle in beiden Richtungen Daten austauschen können. Die Einführung des Mikroprozessors in die Stromrichtertechnik, verbunden mit dem Übergang zur direkten digitalen Regelung (DDC), lässt in absehbarer Zeit neue technische Lösungen auf dem Gebiet der prozessori-entierten Antriebspakete erwarten.
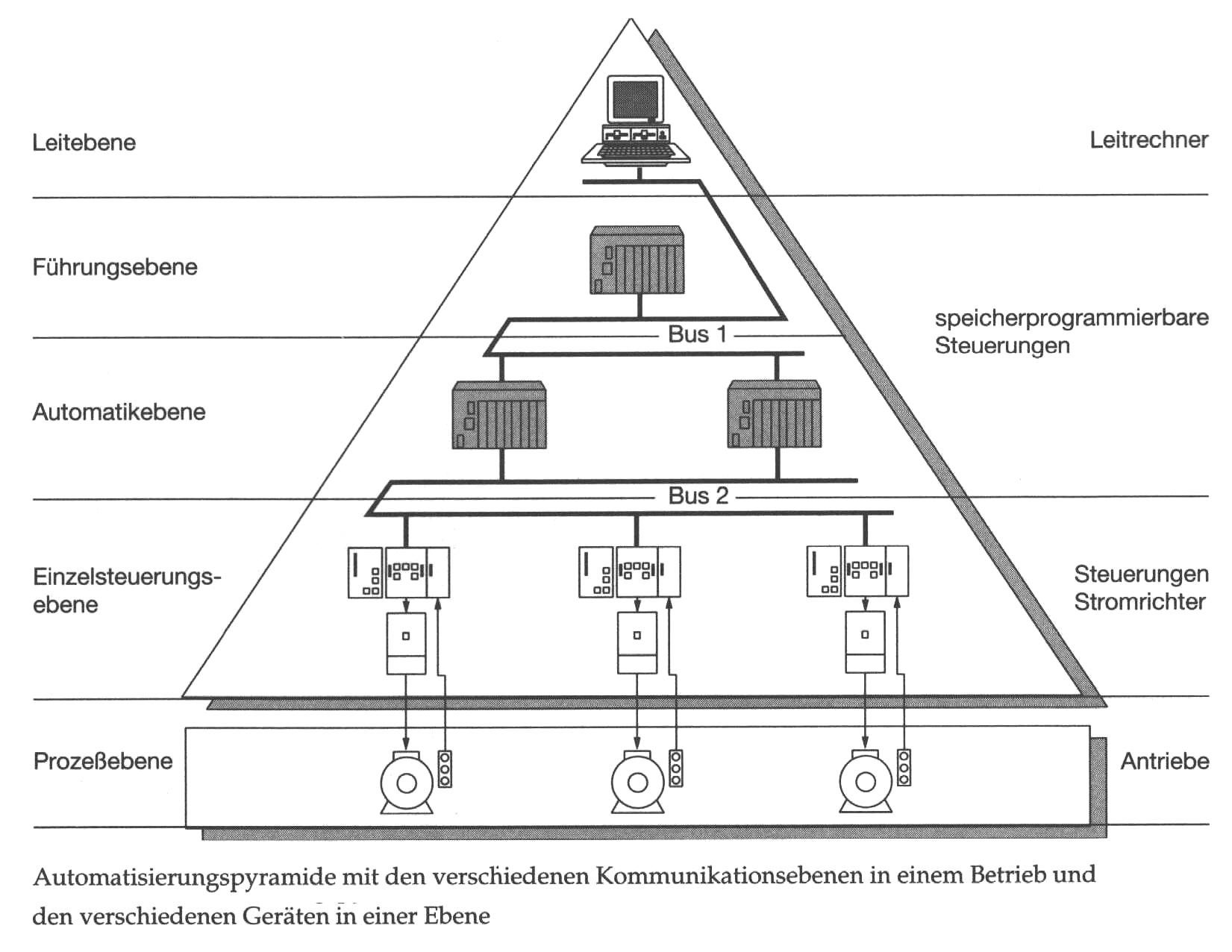
Abbildung 2.2: Verschiedene Ebenen in der Automatisierungstechnik
Die Digitalsteuerung des Stellglieds schafft gleichzeitig eine gute Möglichkeit, die aktuellen Antriebszustände über Schnittstellen (RS 232, RS 486 usw.) zurück zu melden. Dadurch ist jeder Prozess leicht in eine Betriebshierarchie einzubinden. (siehe Abbildung 2.2 Prozessorientierte Antriebe sind so einfacher zu steuern, zu regeln und zu überwachen, wobei die Antriebskomponenten auch noch rechnerüberwacht gewartet werden können.
2.3 Vorteile der veränderbaren Drehzahl
Die stufenlose Drehzahlverstellung eines Antriebs kann folgende Vorteile bieten:
- Energieeinsparung, z.B. bei Pumpen und Lüftern.
- Netzentlastung, da Anlaufstromspitzen reduziert werden.
- Prozessverbesserung, da Geschwindigkeiten dem Prozess optimal anpassbar.
- Qualitätsverbesserung, da Spitzenbelastungen und Laststösse von empfindlichen An-lagen ferngehalten werden.
- Wartungskostensenkung, da Verschleiss reduziert wird.
- Verbesserungen der Arbeitsplatzbedingungen, weil die Transportgeschwindigkeit von Arbeitsbändern der Arbeitsleistung der Bediener angepasst werden kann.