Kapitel 4 Servoumrichter
4.1 Allgemeines
Aufgrund des globalen Preisdrucks und den damit einhergehenden, ansteigenden Anforderungen an moderne Produktionsmaschinen übernehmen Servoantriebe heutzutage komplexe Technologiefunktionen wie zum Beispiel elektronische Kurvenscheiben bzw. Winkelsynchronlauf und Momentenregelung. Servoantriebe übernehmen somit mehr und mehr wichtige Maschinenfunktionen, welche in der Vergangenheit mechanischen Lösungen vorbehalten waren.
Dieser Umstand führt dazu, dass sich Servoantriebe heutzutage durch folgende Eigenschaften auszeichnen:
- hohe Regelgüte
- hohe Dynamik
- vielseitige Schnittstellenmöglichkeiten
- Überlastfähigkeit
- grosser Spannungsbereich der zulässigen Netzspannung
- Anschlussmöglichkeiten für zusätzliche Bedienteile (z.B. PC)
- Busschnittstellen zur Kommunikation zwischen verschiedenen Servoantrieben
- Einhaltung entsprechender EMV-Grenzwerte (Grenzwertklassen A und B gemäss EN 5011)
- Möglichkeit zum Anschluss von Bremswiderständen
4.1.1 Aufbau
Da der Leistungsteil des Umrichters eines Servonatriebes üblicherweise auf dem Prinzip eines Spannungs-Zwischenkreisumrichters basiert, lässt sich der grundsätzliche Aufbau des Servoumrichters wie in Abbildung 4.1 dargestellt zusammenfassen.

Abbildung 4.1: Grundsätzlicher Aufbau eines Servoumrichters
Dabei wird dem versorgenden Netz Energie entnommen, mit Hilfe eines Gleichrichters gleichgerichtet und in einem Zwischenkreis, bestehend aus Kondensatorbänken zwischengespeichert. Der Gleichrichter ist dabei häufig als B6-Diodenbrücke ausgeführt und wird je nach Spannungsniveau des Zwischenkreises, entweder direkt oder über einen vorgeschalteten Transformator mit dem Versorgungsnetz verbunden. Das drehmomentbildende Drehfeld wird mit Hilfe eines Wechselrichters erzeugt und dem Servomotor zugeführt. Da es beim aktiven (elektrischen) Abbremsen des Motors und der Last (Arbeitsmaschine) zur Umwandlung von kinetischer in elektrische Energie kommt, welche quasi in den Zwischenkreis zurückgespeist wird, ist unter Umständen ein zusätzlicher Bremswiderstand notwendig. Wird auf diesen verzichtet, würde die Zwischenkreisspannung in diesem Fall über die zulässigen Werte hinaus ansteigen. Der Zwischenkreis selbst kann dabei entweder nieder- oder hochkapazitiv ausgeführt werden, wodurch sich unterschiedliche Eigenschaften ergeben.
Vorteile niederkapazitiver Spannungszwischenkreise:
- Keine Ladeschaltung notwendig
- Geringe Netzrückwirkungen
- Weniger Bauteile (Kostenreduktion)
- Platzersparnis aufgrund des geringeren Volumens
- Längere Lebensdauer der Kondensatoren
Vorteile hochkapazitiver Spannungszwischenkreise:
- Höhere Energiespeichermöglichkeit
- Vorteile bei dynamischen Anwendungen
- Vorteile bei der Auslegung des Bremswiderstandes
- Effizienterer Energieaustausch zwischen einzelnen Achsmodulen
Der Wechselrichter des Servoumrichters besteht üblicherweise aus IGBT’s und wird als steuerbare B6-Brücke (B6C) ausgeführt (siehe Abbildung 4.2). Dabei sorgt die interne Steuereinheit für die Ansteuerung der IGBTs, wodurch sich am Motor eine pulsweitenmodulierte Spannung einstellt. Dabei wird üblicherweise auf die sogenannte Feldorientierte Regelung zurückgegriffen. Bei der Ansteuerung der Halbbrücken (HB1-HB3) muss sichergestellt werden, dass immer nur ein Schalter (IGBT) geschlossen ist, da sich sonst ein Kurzschluss ergeben würde. Diese Forderung ermöglicht eine vereinfachte Betrachtung einer einzelnen Halbbrücke als einzelnen Schalter der entweder mit dem positiven Potential (oberer Schalter geschlossen) oder dem negativen Potential (unterer Schalter geschlossen) in Verbindung steht. Somit kann die aktuelle Position aller einzelnen Halbrücken in Form eines Vektors mit boolschen Komponenten betrachtet werden, wie dies in Form der erreichbaren Spannungszeiger im \(\alpha-\beta\) - Koordinatensystem der Abbildung 4.2 dargestellt ist. Die Schaltposition 1 repräsentiert dabei eine Verbindung mit dem positiven Potential und die Schaltposition 0 eine Verbindung mit dem negativen Potential.
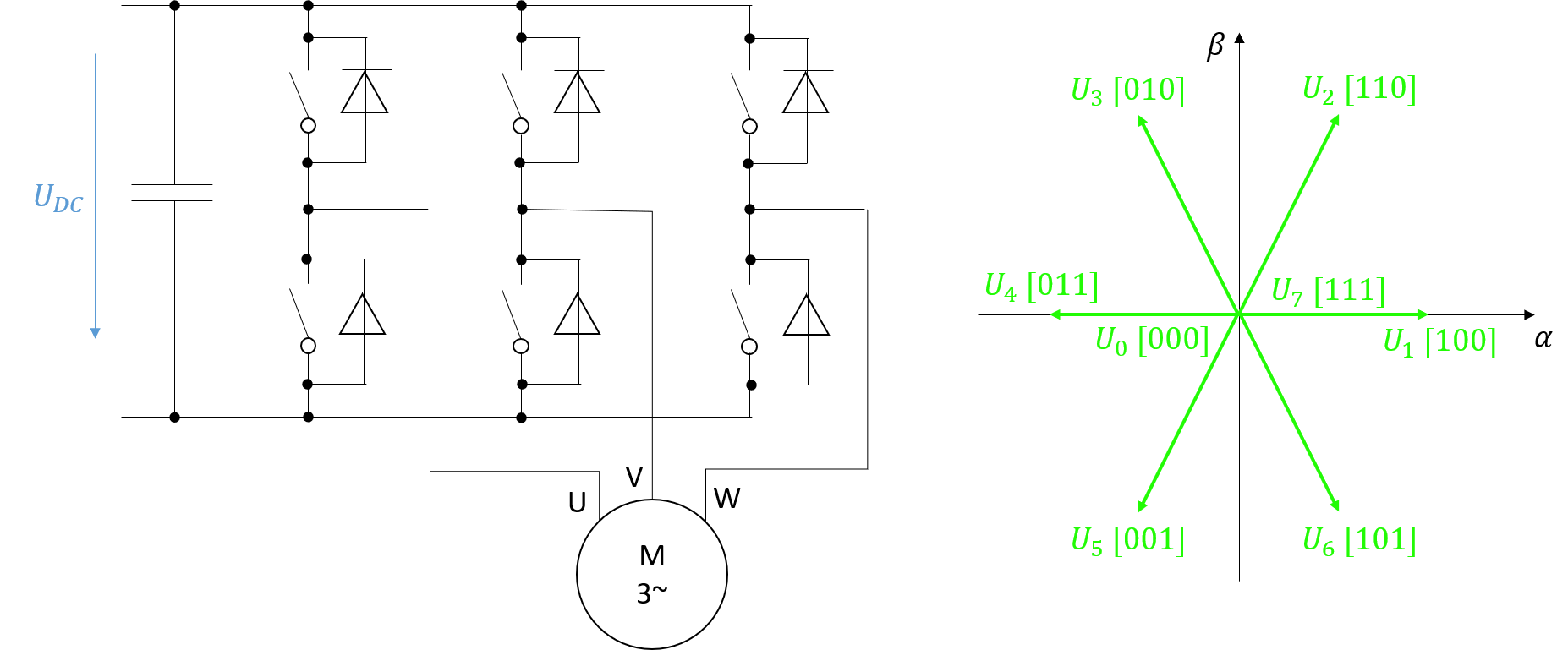
Abbildung 4.2: Aufbau des Wechselrichters für Drehfeldmaschinen und sich einstellende Spannungszeiger im Alpha-Beta-KOS in Raumzeigerdarstellung
Jeder einzelne IGBT besitzt dabei eine antiparallelgeschaltete Freilaufdiode, welche dafür sorgt, dass sich bei induktiver Ausgangslast keine unzulässig hohen Spannungsspitzen im Umschaltmoment einstellen und den Umrichter zerstören.
4.1.2 Resultierender Stromverlauf
Die durch Pulsweitenmodulation erzeugten Spannungssignale auf Motorseite rufen, aufgrund der glättenden Wirkung der Motor- und Leitungsinduktivitäten, einen annähernd sinusförmigen Strom hervor.
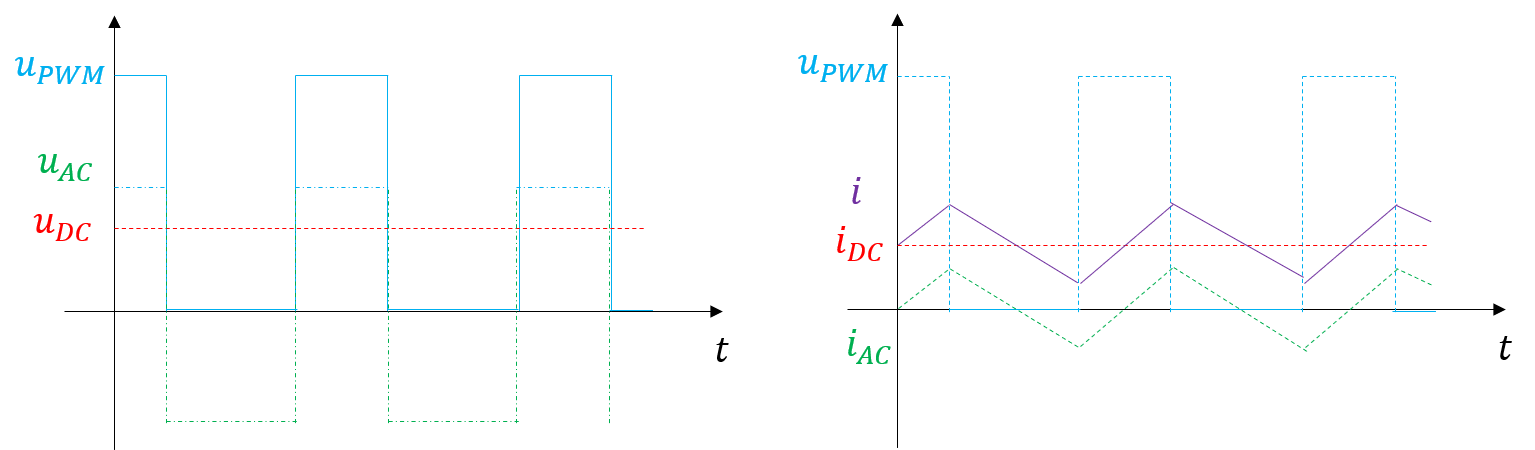
Abbildung 4.3: Gleich- und Wechselanteile der Strom- und Spannungssignale einer einphasigen PWM
Betrachtet man die Signalverläufe im Detail, wird erichtlich, dass sich sowohl die Motorspannung als auch der Motorstrom innerhalb einer Abtastperiode in einen Wechsel- und einen Gleichstromanteil zerlegen lassen (siehe Abbildung 4.3). Der Gleichanteil stellt dabei die gewünschte Strom- bzw. Spannungsamplitude dar. Die Wechselanteile hingegen sind für unerwünschte Verluste im Motor zuständig. Die PWM-Frequenz sowie die Motorinduktivität beeinflussen massgeblich den Stromrippel. Eine Erhöhung der PWM-Frequenz reduziert den Stromrippel und folglich einem reduzierten Oberschwingungsanteil.
4.1.3 Belastungsgrenzen
Aufgrund der häufig recht dynamischen Lastspiele bei der Verwendung von Servoantrieben, kann es zu Leistungsspitzen im Millisekundenbreich kommen, welche die Bemessungsleistung deutlich überschreiten. Folgen diesen längere Ruhepausen im Sekundenbereich, ist dies durchaus zulässig. Wichtig ist dabei, dass die mittlere Auslastung einen Wert von 100 Prozent nicht überschreiten darf. Diese Forderung basiert aus der relativ kurzen thermischen Zeitkonstante der Halbleiter, die im Millisekundenbereich angesiedelt sind. Moderne Prozessoren sind dabei in der Lage die Auslastung des Geräts elektronisch nachzubilden und somit rechtzeitig Warnmeldungen abzugeben oder das Gerät rechtzeitig abzuschalten. Ein beispielhaftes Belastungsdiagramm zeigt dabei Abbildung 4.4.
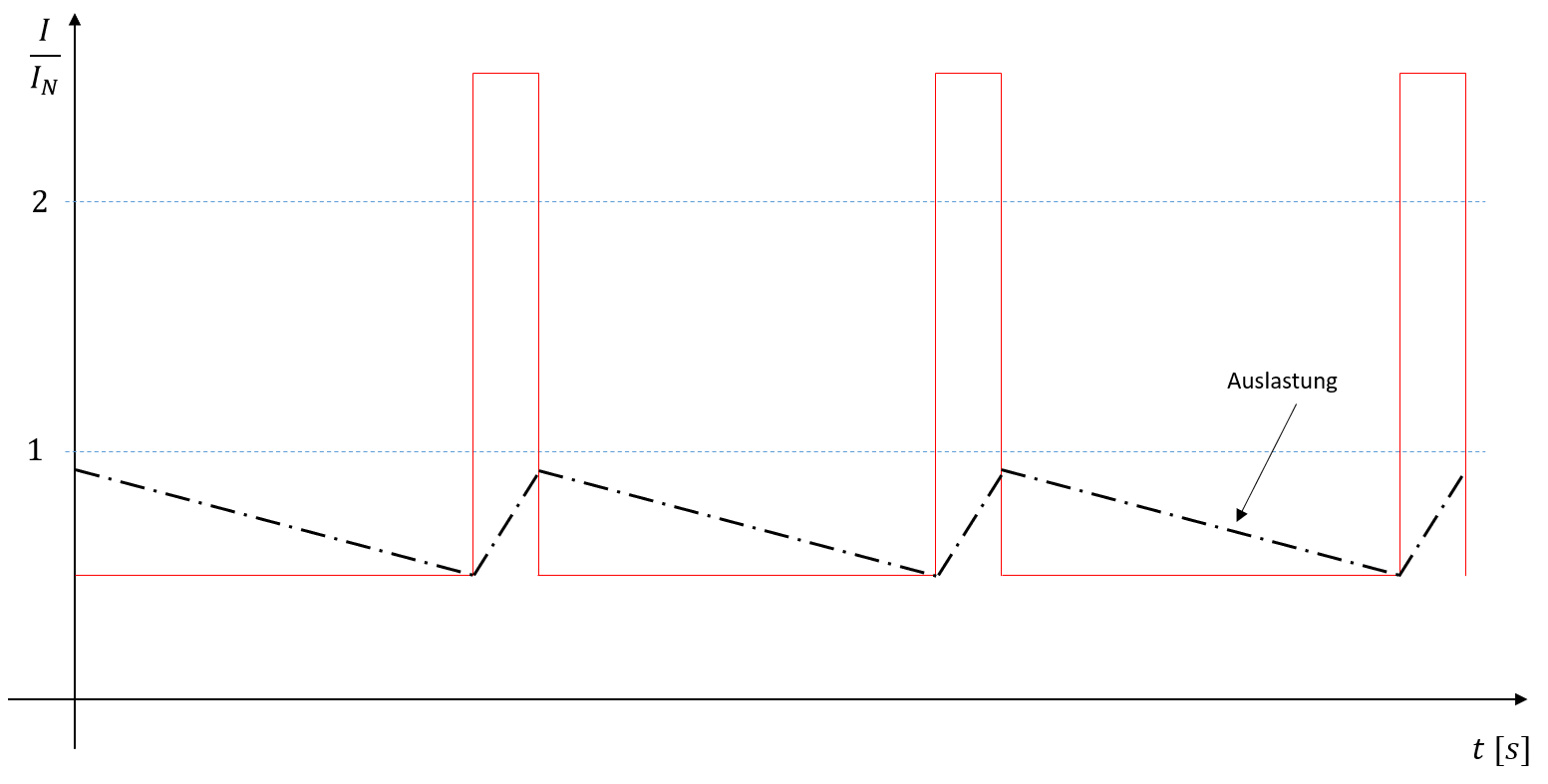
Abbildung 4.4: Beispieldiagramm der Auslastung eines Servoumrichters
Der im Diagramm in Abbildung 4.4 dargestellte Stromverlauf erreicht kurzzeitig und zyklisch das 2.5-fache des Nennstromes. Aufgrund dessen steigt die Auslastung, während der Bestromung über den Bemessungswert hinaus, sehr stark an.
4.1.4 EMV-Betrachtungen
Die Störfestigkeitsklasse moderner Antriebe ist in entsprechenden Normen (z.B. EN 61800-3) definiert und sie kann durch mehrere Parameter beeinflusst werden. Dazu gehören unter anderen:
- Netzseitig:
- Vorhandensein eines Netzfilters
- Länge der Leitungen zwischen Netzfilter und Versorgungsmodul
- Abschrimung der Leitungen zwischen Netzfilter und Versorgungsmodul
- Motorseitig:
- Vorhandensein einer Ausgangsdrossel
- Verwendung abgeschirmter Motorkabel
- Länge der Motorkabel (bei sehr grossen Längen über 100m werden die kapazitiven Ableitströme sehr hoch)
- Installation:
- getrennte Führung von Signal- und Leistungskabeln
- Art und Weise der Verdrahtung der Abschirmungen
4.1.5 Schnittstellenoptionen
Moderne Servoumrichter bieten die Möglichkeit zusätzliche Kommunikationskarten optional hinzuzufügen, die eine vertikale und horizontale Skalierbarkeit ermöglichen.
Entsprechende Möglichkeiten sind:
- Feldbus-Schnittstellen (z.B. Profibus, Profinet, EtherCAT bzw. DeviceNet) ermöglichen die Kommunikationen des Servoantriebs mit der übergeordneten Steuerung.
- Sollten eine Vielzahl von zusätzlichen Endschaltern bzw. Sensoren erforderlich sein, kann auch zusätzliche Eingabe bzw. Ausgabekarten verwendet werden.
- Sollte es sich um schlupfbehaftete Strecken handeln oder sollen mehrere Motoren an einem Achsmodul betrieben werden, ist die Verwendung zusätzlicher Geberkarten möglich.
4.2 Modulares Multiachsen-Servoverstärkersystem
Modulare Multiachsen-Servoverstärkersysteme kommen immer dann zur Anwendung, wenn mehrere Achsen gleichzeitig angetrieben werden müssen (z.B. Werkzeugmaschinen bzw. CNC Anwendungen). Sie zeichnen sich dadurch aus, dass mehrere Achsmodule direkt aus einem einzelnen Zwischenkreis des Versorgungsmoduls versorgt werden. Dieser Aufbau hat den Vorteil, dass ein einzelner Bremswiderstand verwendet werden kann. In speziellen Fällen kann die Versorgungseinheit auch rückspeisefähig aufgebaut sein, wodurch auf einen Bremswiderstand verzichtet werden kann. Aufgrund des gemeinsam verwendeten Zwischenkreises kann Energie zwischen den einzelnen Achsmodulen ausgetauscht werden, sobald einzelne Achsen motorisch und andere generatorisch betrieben werden. Gleichzeitig wird der Installationsaufwand reduziert, da nur ein einzelnes Versorgungsmodul und ein einzelner Bremswiderstand installiert werden müssen.
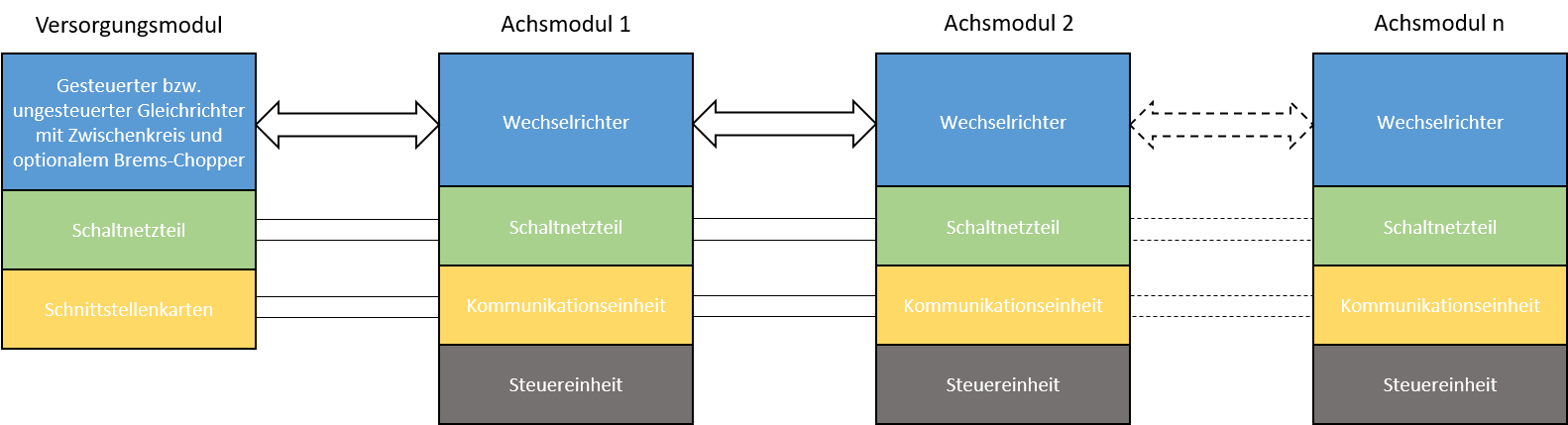
Abbildung 4.5: Grundsätzliche Struktur eines Mehrachsen-Servoumrichters
4.2.1 Einspeiseeinheit
Die Einspeiseeinheit wird häufig als Versorgungsmodul (line supply unit) bezeichnet und dient dazu die verbundenen Achsmodule mit entsprechender elktrischer Leistung zu versorgen. Eine solche Einspeiseeinheit besteht im Normalfall aus folgenden Komponenten:
- Gleichrichter
- Überspannungsschutz
- Schnittstelle zu den Achsmodulen
- Anschluss einer zentralen Schnittstelleneinheit
- Gleichsspannungsversorgung zur Versorgung der Steuer- und Kommunikationseinheiten
- Verschiedene Messeinrichtungen zur Messung der Zwischenkreisspannung bzw. zur Messung der Netzspannung
- Bremschopper und Anschlussklemmen des Bremswiderstandes (alternativ Rückspeiseeinheit)
In vielen Fällen sind Multiachsen-Servoumrichter modular aufgebaut, wodurch der sich in der Versorgungseinheit befindliche Zwischenkreis über entsprechende Schienensysteme mit den Achsmodulen verbunden wird.
4.2.2 Überspannungsschutz
Dient der Servoumrichter dazu Massen mit grossen Trägheitsmomenten anzutreiben, wird die in den beweglichen Teilen gespeicherte kinetische Energie beim Abbremsen in elektrische Energie umgewandelt und in den Zwischenkreis rückgeführt.
\[ E_{Kin} = E_{El} \] \[ \frac{J_{Ges}}{2} \cdot \omega^{2} = \frac{C_{ZK}}{2} \cdot U_{ZK}^{2} \]
Geht man davon aus, dass die Zwischenkreiskapazität konstant ist, wird sich folglich eine Erhöhung der Zwischenkreisspannung einstellen. Eine solche Erhöhung ist lediglich innerhalb spezieller Grenzen zulässig, da es sonst zur Überlastung der Kondensatoren bzw. der Halbleiter kommen kann. Um Überspannungen in diesem Betriebsfall vermeiden zu können, kommen folgende Methoden zum Einsatz:
- Rückspeisung ins Netz (bedingt eine rückspeisefähige Versorgungseinheit)
- Überschüssige Energie wird von anderen Achsmodulen, die in diesem Moment elektrische Energie aufnehmen (mechanische Energie abgeben) genutzt
- Überschhüssige Energie wird über einen Brems-chopper und einen Bremswiderstand in Wärme umgewandelt
- Die Kapazität des Zwischenkreises wird durch entsprechende Kondensatormodule erhöht
4.2.2.1 Rückspeisung ins Netz
Aus energetischer Sicht ist die Rückspeisung in das Netz die beste Variante, da anderen Verbrauchern des Netzes die Bremsenergie zur Verfügung gestellt werden kann. Die Möglichkeiten der Rückspeisung sind dabei vielfältig. In vielen Fällen wird sie dadurch ermöglicht, dass der Diodenbrücke der Versorgungseinheit eine steuerbare Brücke parallelgeschaltet wird. Diese antiparallele Brücke wird netzsynchron angesteuert und ermöglicht für den Fall, dass die Zwischenkreisspannung den Gleichrichtwert übersteigt, eine Rückspeisung der überschüssigen Energie ins Netz. Den prinzipiellen Aufbau einer solchen Versorgungseinheit zeigt Abbildung 4.6.
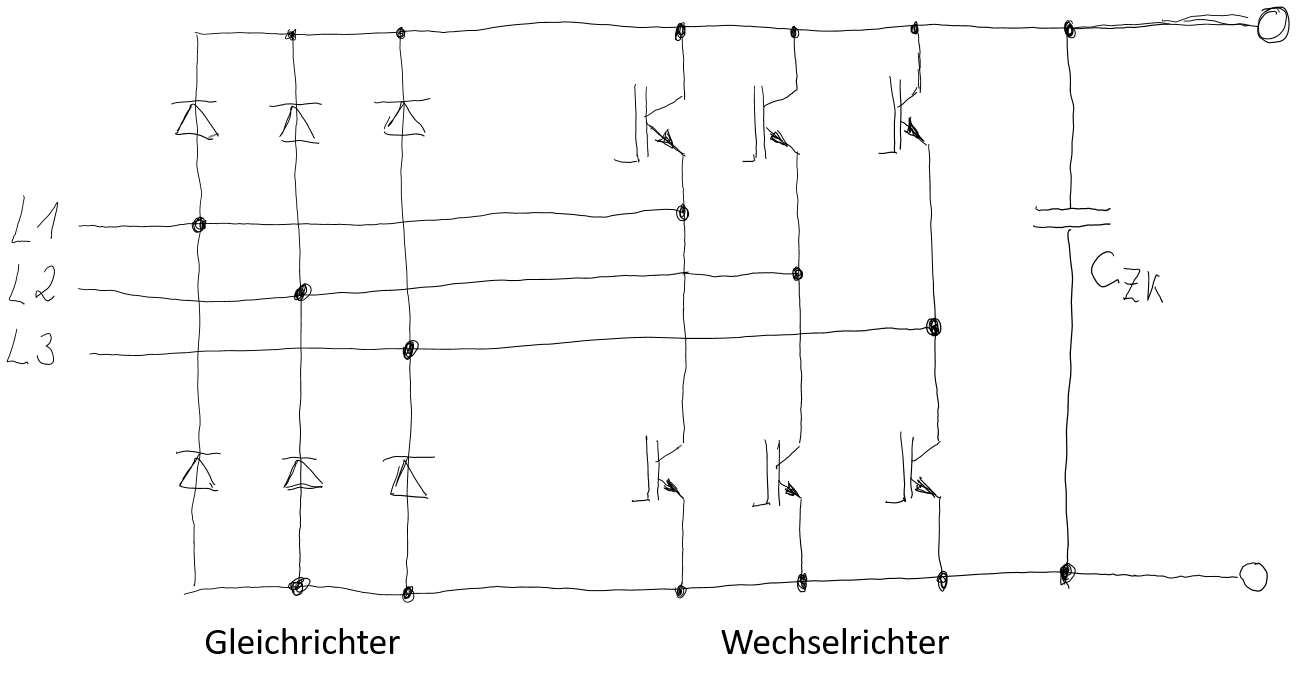
Abbildung 4.6: Grundsätzlicher Aufbau einer rückspeisefähigen Versorgungseinheit
4.2.2.2 Brems-Chopper
Kommt ein Brems-Chopper zum Einsatz, wird die überschüssige Energie in einem Bremswiderstand in Wärme umgewandelt. Der Vorteil eines Brems-choppers liegt grundsätzlich im günstigen Preis im Vergleich zu einer Rückspeiseeinheit. Grundsätzlich sollten Brems-chopper aber nur verwendet werden, wenn die zu verrichtende Bremsarbeit gering ausfällt. Ein solcher Brems-chopper wird üblicherweise mittels Pulsweitenmodulation angesteuert.
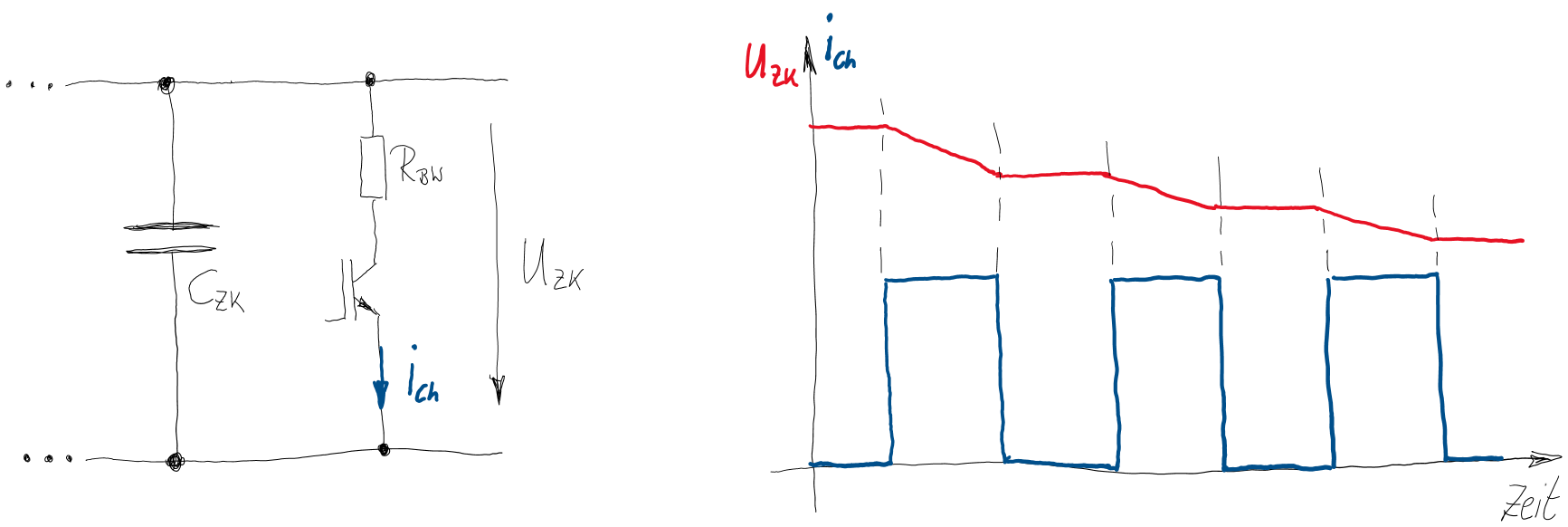
Abbildung 4.7: Grundsätzlicher Aufbau eines Brems-choppers sowie Strom- und Spannungsverläufe
4.2.3 Das Achsmodul
Die Aufgabe des Achsmoduls besteht darin einen Servomotor mit einem frequenz- und amplitudenvariablen dreiphasigen Drehfeld zu versorgen. Es beinhaltet einen Wechselrichter, der mit MOSFETs oder IGBTs aufgebaut wird. Mittlerweile haben sich IGBTs gegenüber der MOSFETs durchgesetzt, da sie geringere Schaltverluste aufweisen, mit hohen Frequenzen angesteuert werden können und eine ausreichend hohe Spannungsfestigkeit aufweisen. Zusätzlich beinhaltet ein Achsmodul folgende Komponenten:
- Kommunikationsschnittstellen sowie binäre Ein- und Ausgänge
- Schnittstellen für Motorgeber
- Optionale Kommunikations- und Steuerungskarten
- Optionale Motor-Temperaturfühler
- Interne Überwachungsfunktionen
- Ansteuerung der Motorbremse
Um mehrere Achsen ansteuern zu können, müssen verschiedene Parameter bei der Dimensionierung des Servoumrichters berücksichtigt werden:
- Summen- und Spitzenleistung der Achsmodule
- Maximalleistung der Versorgungseinheit
- Anzahl der adressierbaren Achsen
- Auslegung der Zwischenkreis-Verschienung
4.3 Servoumrichter für eine Achse
Ein Einachsen-Servoumrichter weist sich durch kompakte Bauweise aus, da er in einem einzelnen Gehäuse sowohl den Gleichrichter, den Zwischenkreis, den Brems-chopper, den Wechselrichter, die Einschübe für optionale Kommunikationskarten sowie die eigentliche Steuereinheit beinhaltet.