Kapitel 1 Einleitung
In der heutigen Zeit, in der industrielle Prozesse automatisiert werden, besteht auch ein grosser Bedarf an elektrischen Stellantrieben. Werden durch die Prozesse hohe Anforderungen bezüglich Positioniergenauigkeit und Dynamik gestellt, kommen Servonatriebe zum Einsatz. Eine Skalierung erfolgt dabei entsprechend der Stromstärke in unterschiedliche Leistungsklassen. Bei speziellen Anwendungen (z.B. Robotik) wird ausserdem ein Zusammenspiel mehrerer Antriebe in einem einzelnen System gefordert. Eine entsprechende Vernetzung bedingt bei heutigen Antriebe deshalb die Verwendung klassischer Feldbusse oder Echtzeit-Ethernet Schnittstellen. Eine externe SPS oder in den Antrieben integrierte SPS Funktionalität sorgt dabei für die Steuerung des Antriebssystems. Die entsprechenden Regelkreise werden dabei meist auf einem Mikrocontroller oder digitalen Signalprozessoren (DSP) im Antriebsregler umgesetzt. Da diese Antriebe sehr universell einsetzbar sind, verfügen sie über eine Vielzahl von Parametern, die sie für den Anwender u.U. aufgrund ihrer Komplexität schwer handhabbar machen.
1.1 Grundlegende Definition eines Servoantriebs
Allgemein betrachtet beinhaltet ein Servoantrieb alle Komponenten, die notwendig sind um dynamische Bewegungen mittels elektrischer Motoren zu gewährleisten. Umfasst werden von diesem Begriff, etwaige Sensorik zur Erfassung der entsprechenden Zustandsgrössen, die Regeleinheit zur Berechnung der Regelalgorithmen, Schnittstellen zum Datenaustausch mit einer übergeordneten Steuerung sowie den Frequenzumrichter und den Servomotor selbst. Ein entsprechendes Blockschaltbild ist in Abbildung 1.1 dargestellt.
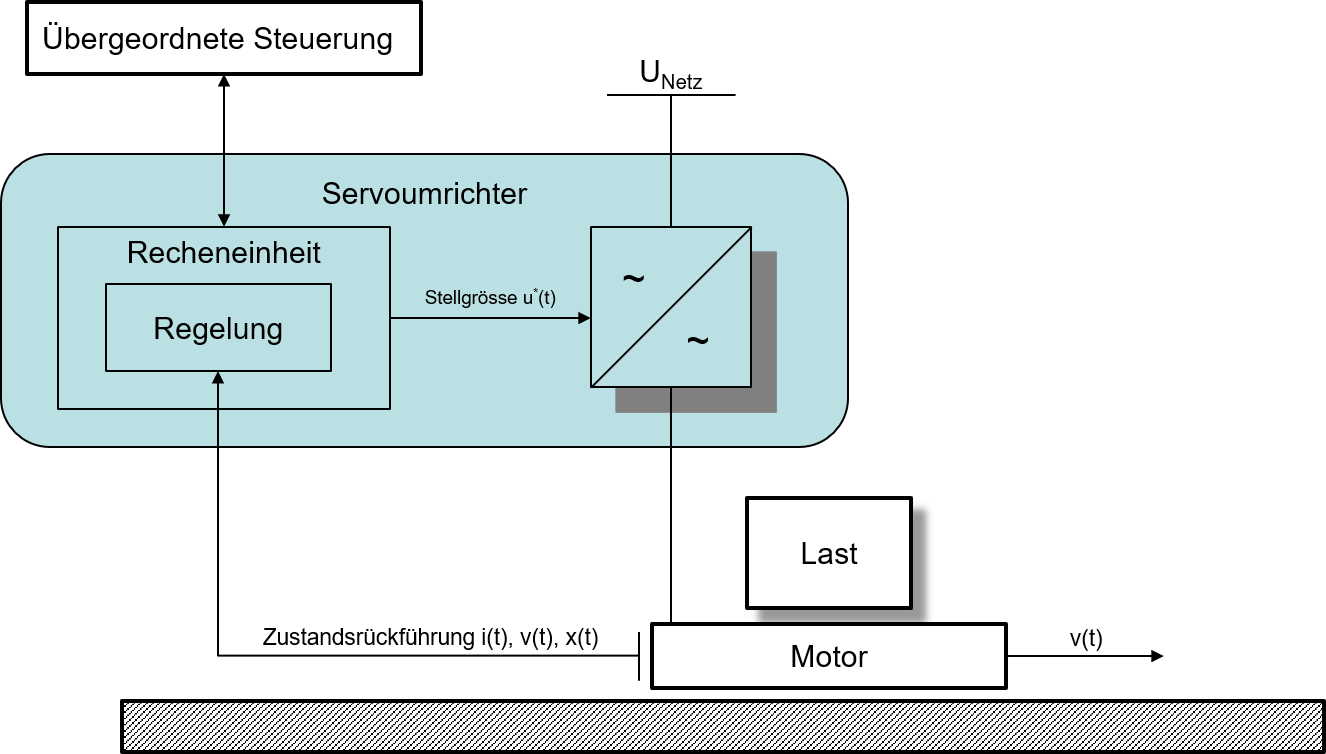
Abbildung 1.1: Blockschaltbild eines Servoumrichters
Als Servoumrichter bezeichnet man dabei die Einheit aus Frequenzumrichter mit der integrierten Antriebsregelung. Ausserdem besteht heutzutage mehr und mehr die Forderung nach integrierten Diagnosemöglichkeiten zur Fernwartung und Zustandsüberwachung.
1.2 Einordung und Historie der Servotechnik
Abgeleitet vom lateinischen Ausdruck "Servus", was soviel wie Sklave oder Diener bedeutet, wurde dieser Begriff in der Vergangenheit geprägt, als Servoantriebe lediglich als Hilfsantriebe für einfache Aufgaben verwendet wurden. Dieser beschränkte Einsatz lässt sich auf die relativ schlechten Wirkungsgrade der damaligen Leistungselektronik bzw. Maschinentypen zurückführen. Zur damaligen Zeit wurden die Antriebe analog geregelt, was einen sehr grossen Aufwand bei entsprechenden Modifikationen bzw. Erweiterungen nach sich zog. Dieser Zustand hat sich heutzutage stark gewandelt, da rasante Entwicklungen im Bereich der Halbleitertechnik sowie der Mikroelektronik stattgefunden haben. Dieser Fortschritt ermöglicht hochintegrierte und leistungsfähige Mikroprozessoren und Speicherbausteine, welche den Übergang zu digitalen Regelungen ermöglichte und den Funktionsumfang moderner Servoantriebe deutlich erweiterte. Aufgrund dessen werden Servoantriebe heutzutage sehr häufig als Hauptantriebe eingesetzt.
1.3 Grundlegende Einsatzgebiete
Der zunehmende Kostendruck in allen Bereich des modernen Anlagen- und Maschinenbaus führt zu zunehmender Automatisierung, welche hohe Anforderungen an Flexibilität bei Produktwechseln stellt sowie immer kürzeren Durchlaufzeiten erfordert. Diesen Forderungen wird die konventionelle Asynchrontechnik mit hydraulisch und pneumatisch bewegten Komponenten nicht mehr gerecht. Die Folge ist eine grundlegende Veränderung in der Antriebstechnik. Dabei werden Servomotoren in einer Vielzahl unterschiedlicher Industrien eingesetzt. Dazu zählen unter anderem:
- Fördertechnik
- Verpackungsindustrie
- Robotertechnik
- Werkzeumaschinenindustrie
- Papierindustrie
- Metallindustrie
- Lebensmittelindustrie
Zum Einsatz kommen dabei grundsätzlich folgende Antriebstypen:
- Synchrone Servomotoren
- Asynchrone Servomotoren
- Synchrone Linearmotoren
Positionierbare Servoantriebe werden dabei hauptsächlich im Leistungsbereich bis ca. 10kW angetroffen. Bei höheren Leistungen sind sie seltener anzutreffen, da sich die deutlichen höheren Kosten im Vergleich zu Normmotoren bemerkbar machen. Hinzu kommt die einfache Bedienbarkeit und die unkomplizierte Integration in bestehende Antriebssysteme.