11 Hierarchical Clustering
Watch a video of this chapter: Part 1 Part 2 Part 3
Clustering or cluster analysis is a bread and butter technique for visualizing high dimensional or multidimensional data. It’s very simple to use, the ideas are fairly intuitive, and it can serve as a really quick way to get a sense of what’s going on in a very high dimensional data set.
Cluster analysis is a really important and widely used technique. If you just type “cluster analysis” into Google, there are many millions of results that come back.
Google search results for “cluster analysis”
And it’s a widely applied method in many different areas of science, business, and other applications. So it’s useful to know how these techniques work.
The point of clustering is to organize things or observations that are close together and separate them into groups. Of course, this simple definition raises some immediate questions:
How do we define close?
How do we group things?
How do we visualize the grouping?
How do we interpret the grouping?
All clustering techniques confront a basic issue, which is how do we define when things are close together and when things are far apart? Essentially, the wide variety of clustering techniques out there that you can apply to data differ in the ways that they answer these questions.
11.1 Hierarchical clustering
Hierarchical clustering, as is denoted by the name, involves organizing your data into a kind of hierarchy. The common approach is what’s called an agglomerative approach. This is a kind of bottom up approach, where you start by thinking of the data as individual data points. Then you start lumping them together into clusters little by little until eventually your entire data set is just one big cluster.
Imagine there’s all these little particles floating around (your data points), and you start kind of grouping them together into little balls. And then the balls get grouped up into bigger balls, and the bigger balls get grouped together into one big massive cluster. That’s the agglomerative approach to clustering, and that’s what we’re going to talk about here.
The algorithm is recursive and goes as follows:
Find closest two things points in your dataset
Put them together and call them a “point”
Use your new “dataset” with this new point and repeat
This methodology requires that you have a way to measure the distance between two points and that you have an approach to merging two points to create a new “point”. A benefit of this clustering methodology is that you can produce a tree showing how close things are to each other, which is simply a by product of running the algorithm.
11.2 How do we define close?
Defining closeness is a key aspect of defining a clustering method. Ultimately, the old rule of “garbage in, garbage out” applies. If you don’t use a distance metric that makes sense for your data, then you won’t get any useful information out of the clustering.
There are a number of commonly used metrics for characterizing distance or its inverse, similarity:
Euclidean distance: A continuous metric which can be thought of in geometric terms as the “straight-line” distance between two points.
Correlation similarity: Similar in nature to Euclidean distance
“Manhattan” distance: on a grid or lattice, how many “city blocks” would you have to travel to get from point A to point B?
The important thing is to always pick a distance or similarity metric that makes sense for your problem.
11.3 Example: Euclidean distance
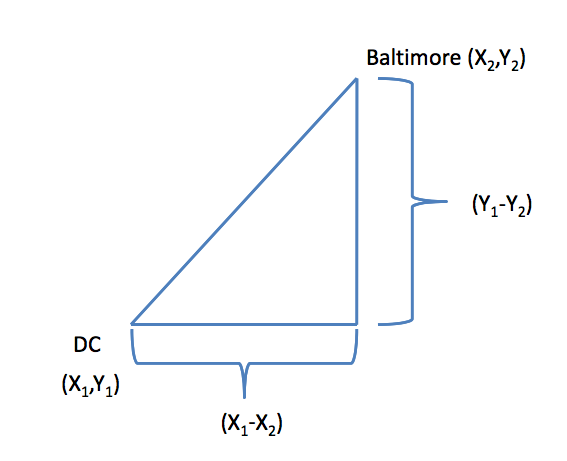
Euclidean distance
For example, take two cities, say, Baltimore and Washington D.C., and put them on a map. If you imagine that the center of each city has an X and a Y coordinate (say, longitude and latitude), and you want to map the distance between the centers of the two cities, then you can draw a straight diagonal line between the two cities. The distance can be calculated in the usual way, which is going to be a function of the difference in the x coordinates and the difference in the y coordinates. In the two-dimensional plane, you take the distance in the x coordinates, square it, take the difference in the y coordinates, square that, and then add the two squares together and take the square root of the whole thing. In other words,
\[ Distance = [(X_1 - X_2)^2 + (Y_1 - Y_2)^2]^{1/2} \]
That’s the classical definition of Euclidian distance. You can imagine if a bird were to fly from Washington, D.C. to Baltimore, it would just fly straight from one city to another. This is possible because a bird isn’t impeded by things like roads or mountains, or whatever. Whether that makes sense for you depends on, among other things, whether you’re a bird or not. And so you have to think about the properties of this distance metric in the context of your problem.
One nice feature of Euclidean distance is that it’s easily generalizable to higher dimensions. If instead of two dimensions you have 100 dimensions, you can easily take the differences between each of the 100 dimensions, square them, sum them together and then take the square root. So the Euclidean distance metric extends very naturally to very high dimensions problems.
In general the formula for Euclidean distance between point
\[ A = (A_1, A_2, \dots, A_n) \]
and
\[ B = (B_1, B_2, \dots, B_n) \]
is
\[ Distance = ((A_1-B_1)^2 + (A_2-B_2)^2 + \cdots + (A_n-B_n)^2)^{(1/2)} \]
11.4 Example: Manhattan distance
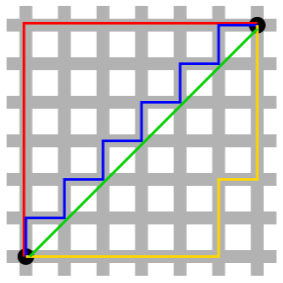
The Manhattan distance gets its name from the idea that you can look at points as being on a grid or lattice, not unlike the grid making up the streets of Manhattan in New York City.
Manhattan distance
In a city, if you want to go from point A to point B, you usually cannot take the direct route there because there will be buildings in the way. So instead, you have to follow the streets, or the grid layout, of the city to navigate around. That’s the idea behind Manhattan distance
In the figure above, the red, blue, and yellow lines show various way of getting between the two black circles using the grid layout, while the green line shows the Euclidean distance. The Manhattan distance between the points is simply the sum of the right-left moves plus the sum of all the up-down moves on the grid.
In general:
\[ Distance = |A_1-B_1| + |A_2-B_2| + \cdots + |A_n-B_n| \]
Check out Wikipedia’s page on taxicab geometry for a fun diversion.
11.5 Example: Hierarchical clustering
Here is a simple example demonstrating how hierarchical clustering works. First we’ll simulate some data in three separate clusters.
> set.seed(1234)
> x <- rnorm(12, rep(1:3, each = 4), 0.2)
> y <- rnorm(12, rep(c(1, 2, 1), each = 4), 0.2)
> plot(x, y, col = "blue", pch = 19, cex = 2)
> text(x + 0.05, y + 0.05, labels = as.character(1:12))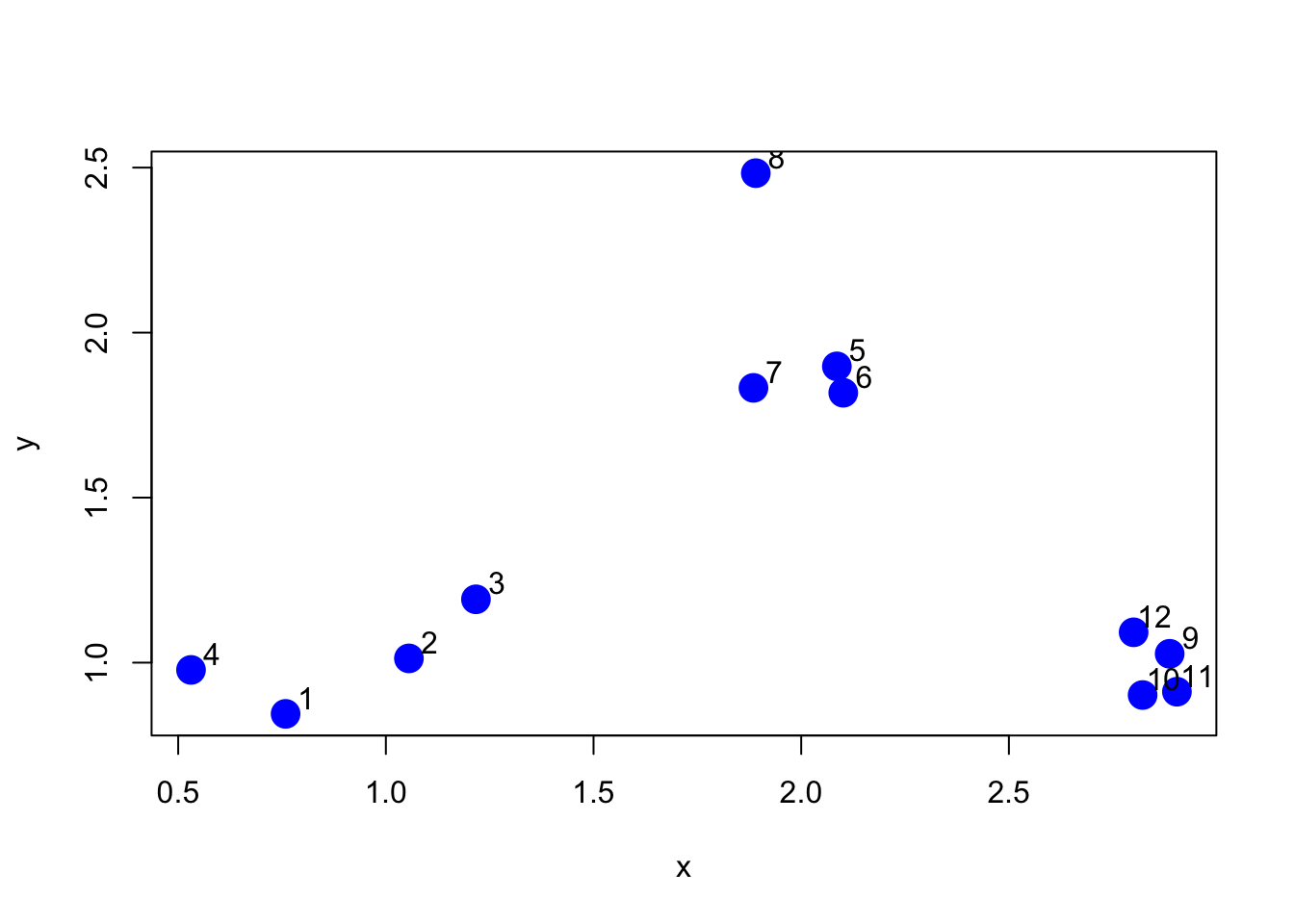
Figure 5.1: Simulated clustered data
The first step in the basic clustering approach is to calculate the distance between every point with every other point. The result is a distance matrix, which can be computed with the dist() function in R.
Here is just a piece of the distance matrix associated with the figure above.
> dataFrame <- data.frame(x=x, y=y)
> dist(dataFrame)
1 2 3 4 5 6 7
2 0.34120511
3 0.57493739 0.24102750
4 0.26381786 0.52578819 0.71861759
5 1.69424700 1.35818182 1.11952883 1.80666768
6 1.65812902 1.31960442 1.08338841 1.78081321 0.08150268
7 1.49823399 1.16620981 0.92568723 1.60131659 0.21110433 0.21666557
8 1.99149025 1.69093111 1.45648906 2.02849490 0.61704200 0.69791931 0.65062566
9 2.13629539 1.83167669 1.67835968 2.35675598 1.18349654 1.11500116 1.28582631
10 2.06419586 1.76999236 1.63109790 2.29239480 1.23847877 1.16550201 1.32063059
11 2.14702468 1.85183204 1.71074417 2.37461984 1.28153948 1.21077373 1.37369662
12 2.05664233 1.74662555 1.58658782 2.27232243 1.07700974 1.00777231 1.17740375
8 9 10 11
2
3
4
5
6
7
8
9 1.76460709
10 1.83517785 0.14090406
11 1.86999431 0.11624471 0.08317570
12 1.66223814 0.10848966 0.19128645 0.20802789The default distance metric used by the dist() function is Euclidean distance.
Note that usually you will not have to explicitly compute the distance matrix (unless you are inventing your own clustering method). Here I just print it out to show what’s going on internally.
First an agglomerative clustering approach attempts to find the two points that are closest together. In other words, we want to find the smallest non-zero entry in the distance matrix.
> rdistxy <- as.matrix(dist(dataFrame))
>
> ## Remove the diagonal from consideration
> diag(rdistxy) <- diag(rdistxy) + 100000
>
> # Find the index of the points with minimum distance
> ind <- which(rdistxy == min(rdistxy), arr.ind = TRUE)
> ind
row col
6 6 5
5 5 6Now we can plot the points and show which two points are closest together according to our distance metric.
> plot(x, y, col = "blue", pch = 19, cex = 2)
> text(x + 0.05, y + 0.05, labels = as.character(1:12))
> points(x[ind[1, ]], y[ind[1, ]], col = "orange", pch = 19, cex = 2)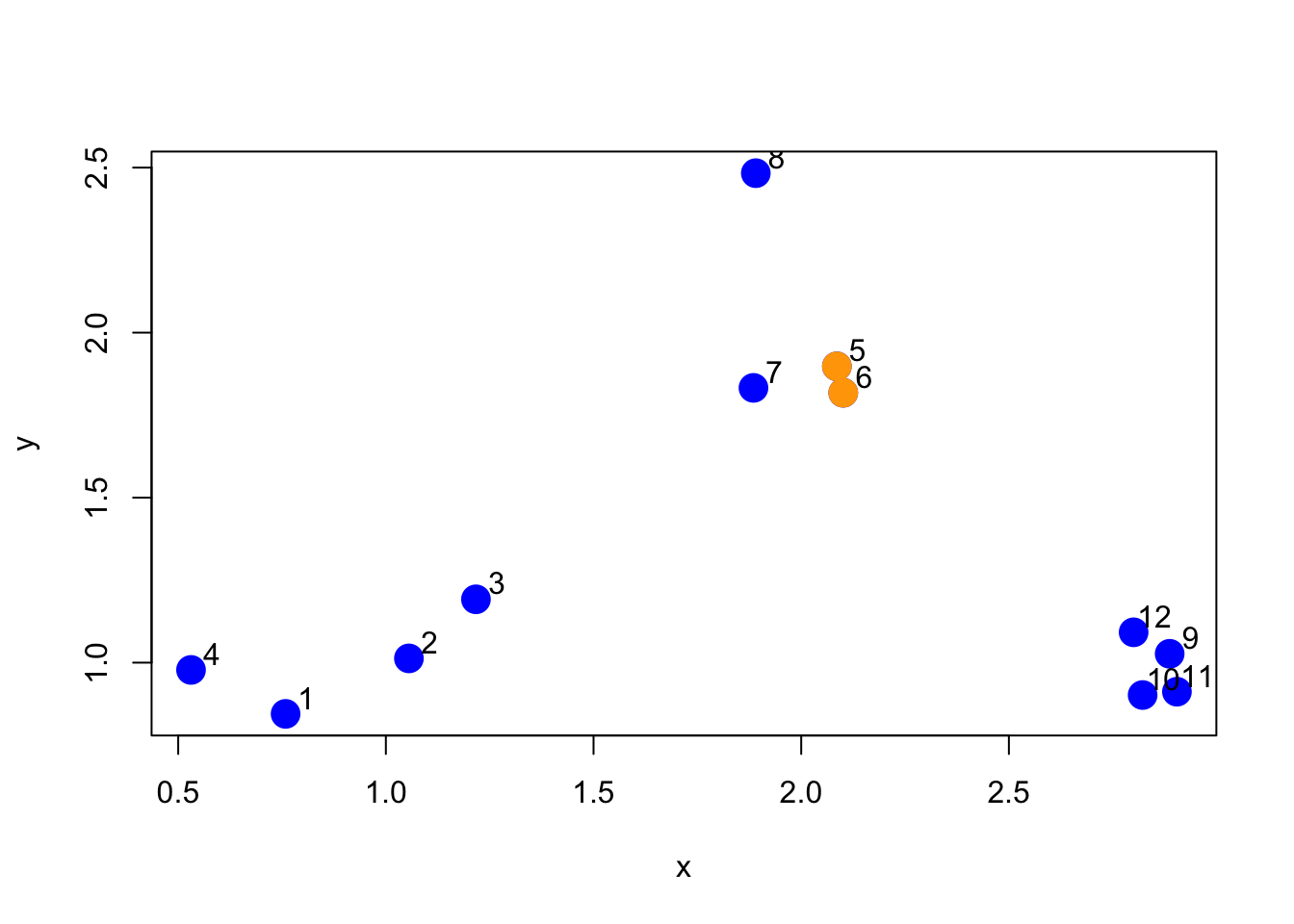
Figure 5.4: Two closest points
The next step for the algorithm is to start drawing the tree, the first step of which would be to “merge” these two points together.
> par(mfrow = c(1, 2))
> plot(x, y, col = "blue", pch = 19, cex = 2, main = "Data")
> text(x + 0.05, y + 0.05, labels = as.character(1:12))
> points(x[ind[1, ]], y[ind[1, ]], col = "orange", pch = 19, cex = 2)
>
> # Make a cluster and cut it at the right height
> library(dplyr)
> hcluster <- dist(dataFrame) %>% hclust
> dendro <- as.dendrogram(hcluster)
> cutDendro <- cut(dendro, h = (hcluster$height[1] + 0.00001))
> plot(cutDendro$lower[[11]], yaxt = "n", main = "Begin building tree")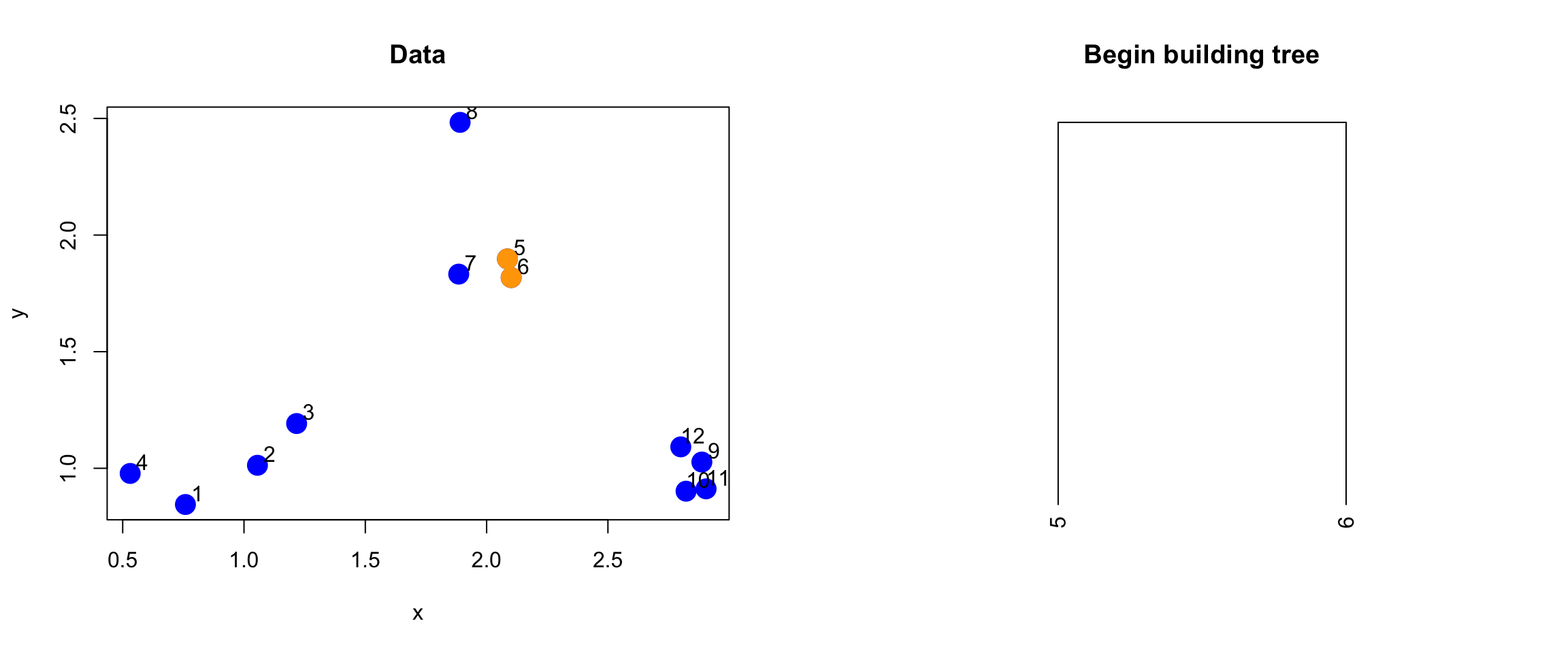
Figure 5.5: Merging of first two points
Now that we’ve merged the first two “leaves” of this tree, we can turn the algorithm crank and continue to build the tree. Now, the two points we identified in the previous iteration will get “merged” into a single point, as depicted below.
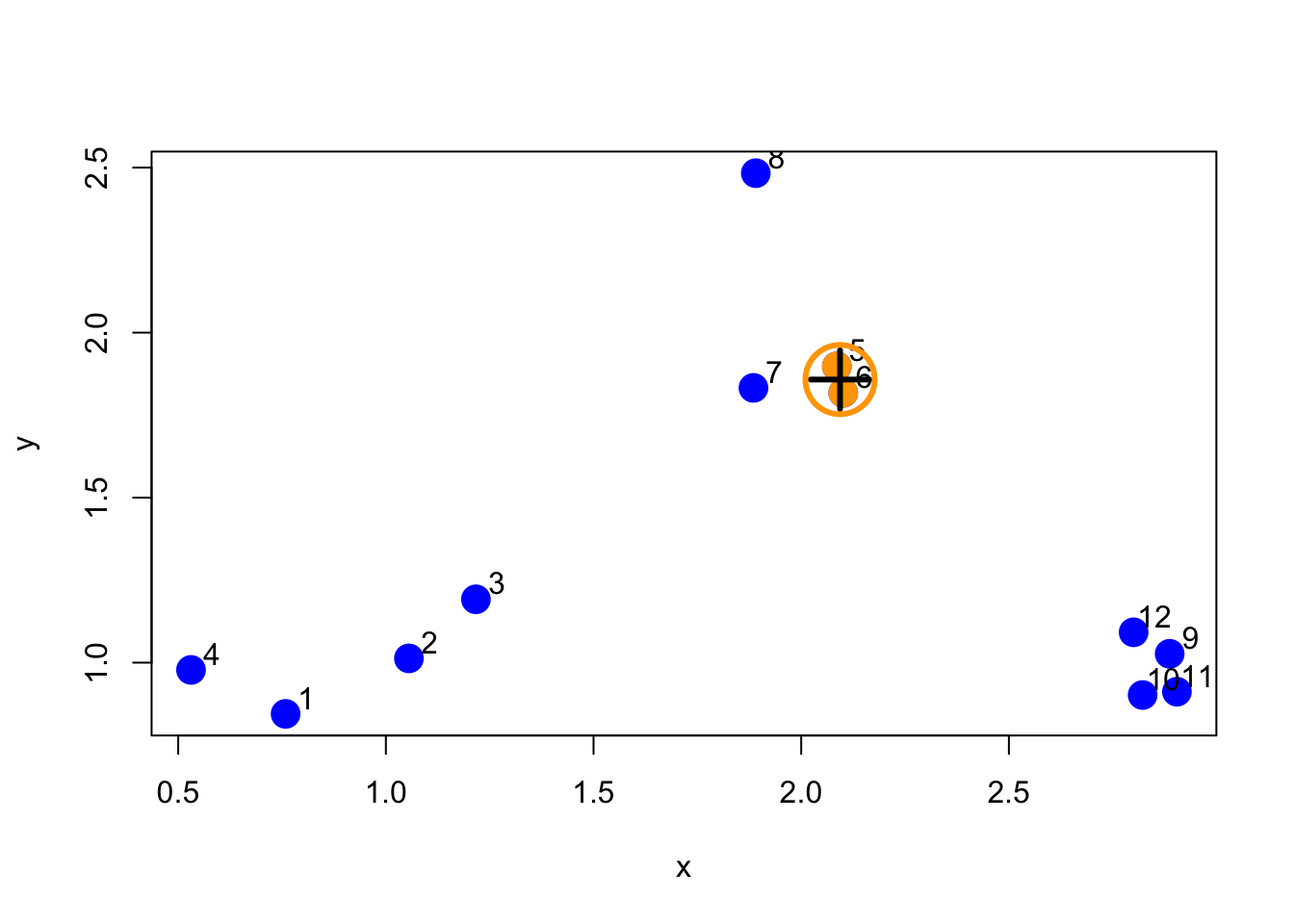
Figure 5.6: First set of merged points/cluster
We need to search the distance matrix for the next two closest points, ignoring the first two that we already merged.
> nextmin <- rdistxy[order(rdistxy)][3]
> ind <- which(rdistxy == nextmin,arr.ind=TRUE)
> ind
row col
11 11 10
10 10 11Now we can plot the data with this next pair of points and the merged tree leaves.
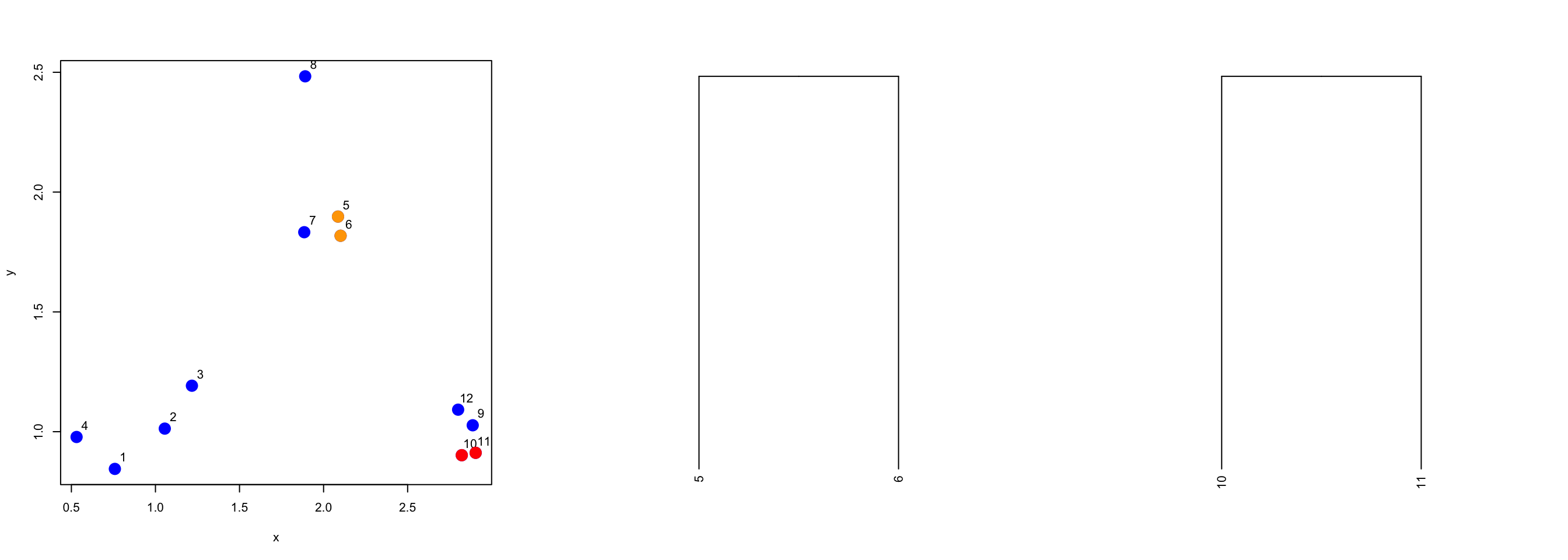
Figure 5.8: Second set of merged points
And on and on in this manner. If we were to continue in this fashion–identifying the two closest points and merging them, we’d end up with a dendrogram that looks like this one. Here, we call the hclust() do run the clustering algorithm.
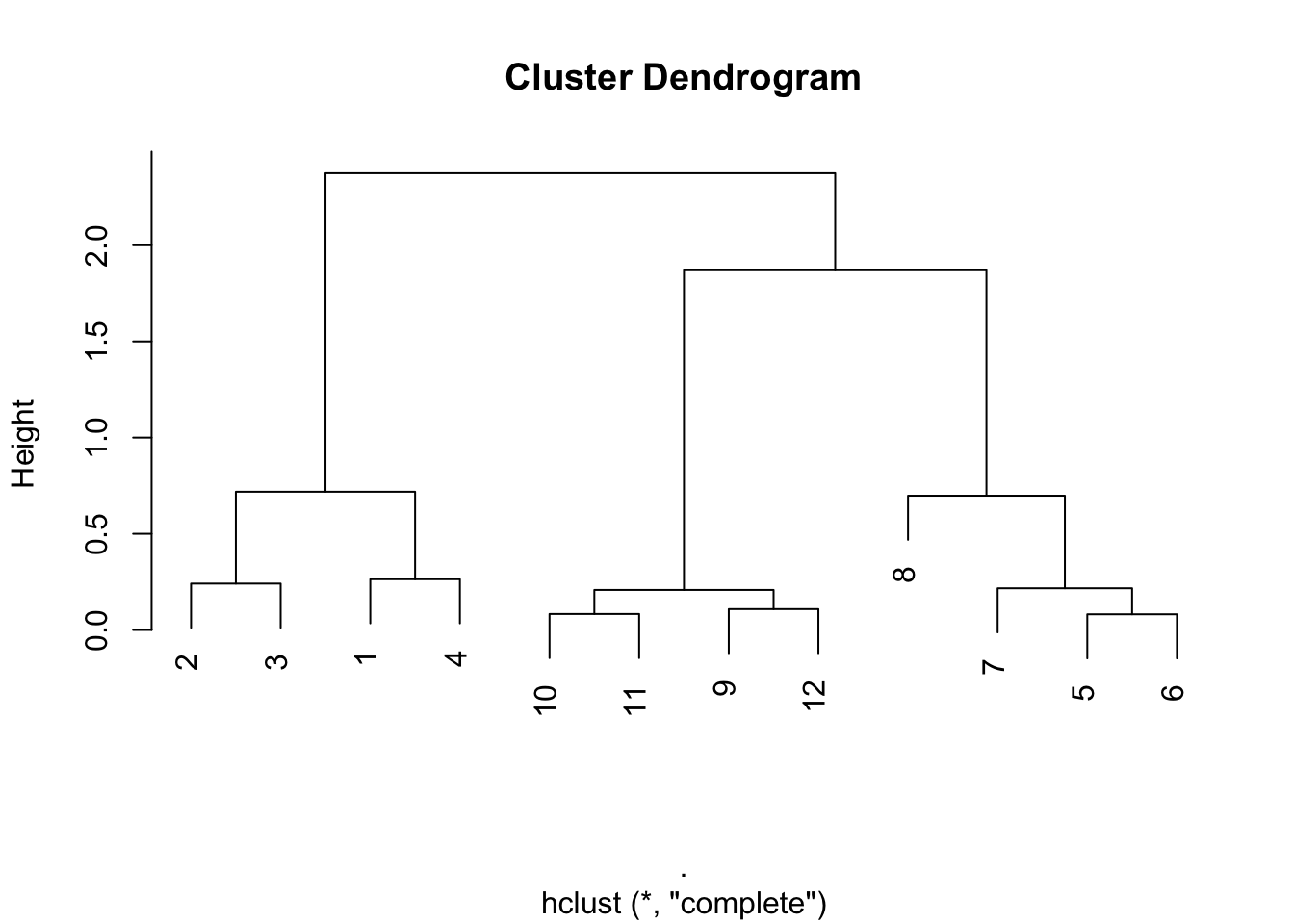
Figure 5.9: Full hierarchical clustering dendrogram
From the tree/dendrogram it’s clear that there are three clusters each with four points.
11.6 Prettier dendrograms
It’s possible to make slightly prettier dendrograms with some modification to the usual plotting method for the output of hclust(). Here’s a function that takes the output of hclust() and color codes each of the cluster members by their cluster membership.
> myplclust <- function(hclust, lab = hclust$labels, lab.col = rep(1, length(hclust$labels)),
+ hang = 0.1, ...) {
+ ## modifiction of plclust for plotting hclust objects *in colour*! Copyright Eva
+ ## KF Chan 2009 Arguments: hclust: hclust object lab: a character vector of labels
+ ## of the leaves of the tree lab.col: colour for the labels; NA=default device
+ ## foreground colour hang: as in hclust & plclust Side effect: A display of
+ ## hierarchical cluster with coloured leaf labels.
+ y <- rep(hclust$height, 2)
+ x <- as.numeric(hclust$merge)
+ y <- y[which(x < 0)]
+ x <- x[which(x < 0)]
+ x <- abs(x)
+ y <- y[order(x)]
+ x <- x[order(x)]
+ plot(hclust, labels = FALSE, hang = hang, ...)
+ text(x = x, y = y[hclust$order] - (max(hclust$height) * hang), labels = lab[hclust$order],
+ col = lab.col[hclust$order], srt = 90, adj = c(1, 0.5), xpd = NA, ...)
+ }And here’s the output the function produces.
> hClustering <- data.frame(x = x, y = y) %>% dist %>% hclust
> myplclust(hClustering, lab = rep(1:3, each = 4), lab.col = rep(1:3, each = 4))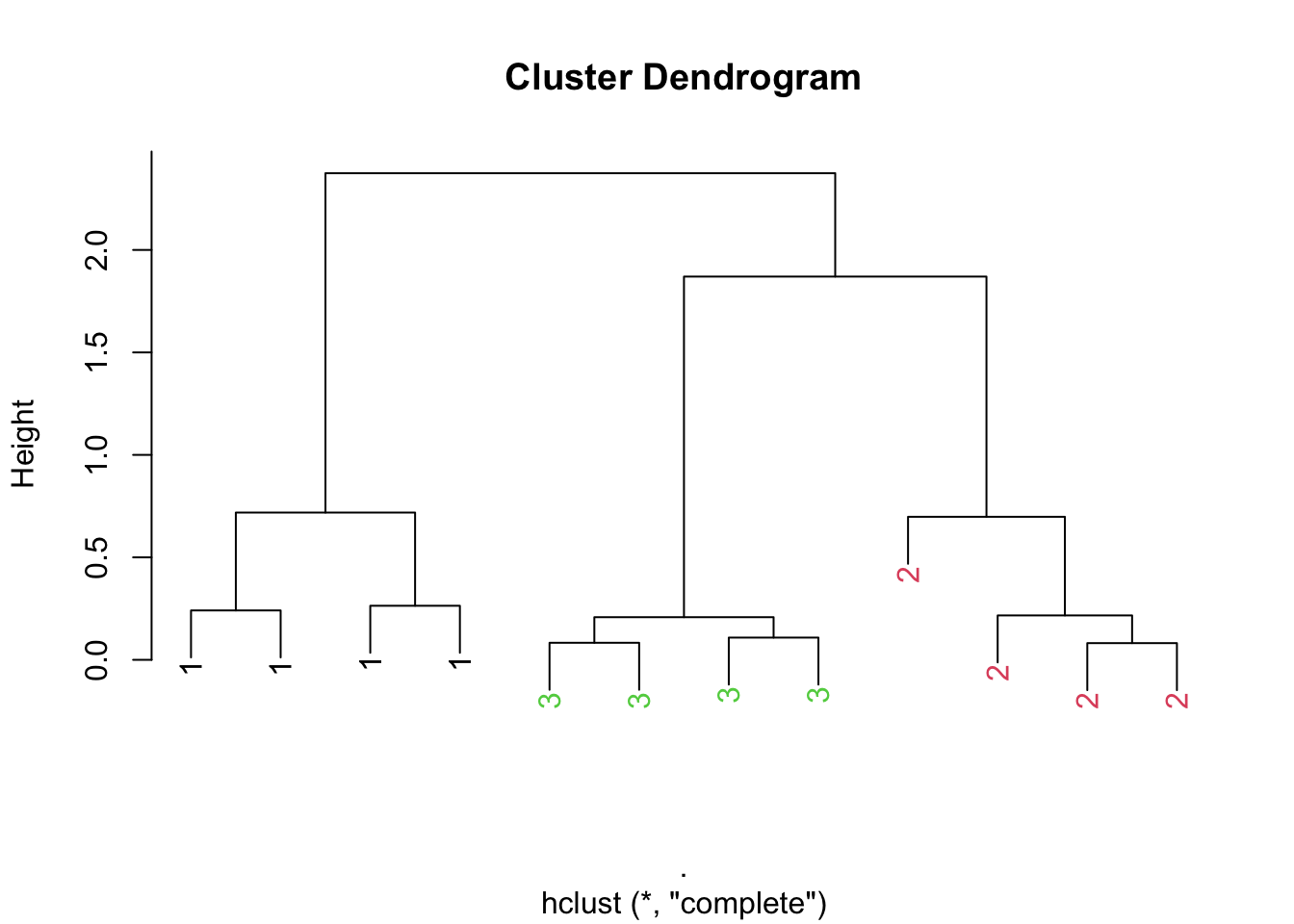
Figure 6.1: Prettier dendrogram
11.7 Merging points: Complete
One issue that we haven’t discussed yet is how exactly the merging of clusters works. Recall that once we find the two points that are closest together, we “merge” them and then consider the merged pair as a single “point”. When we compare this merged “point” with other points, how should we measure the distance from one point to this merged cluster of points?
One method, called “complete” is to measure the distance between two groups of points by the maximun distance between the two groups. That is, take all points in group 1 and all points in group 2 and find the two points that are furthest apart–that’s the distance between the groups.
Here’s what that would look like with our simulated data.
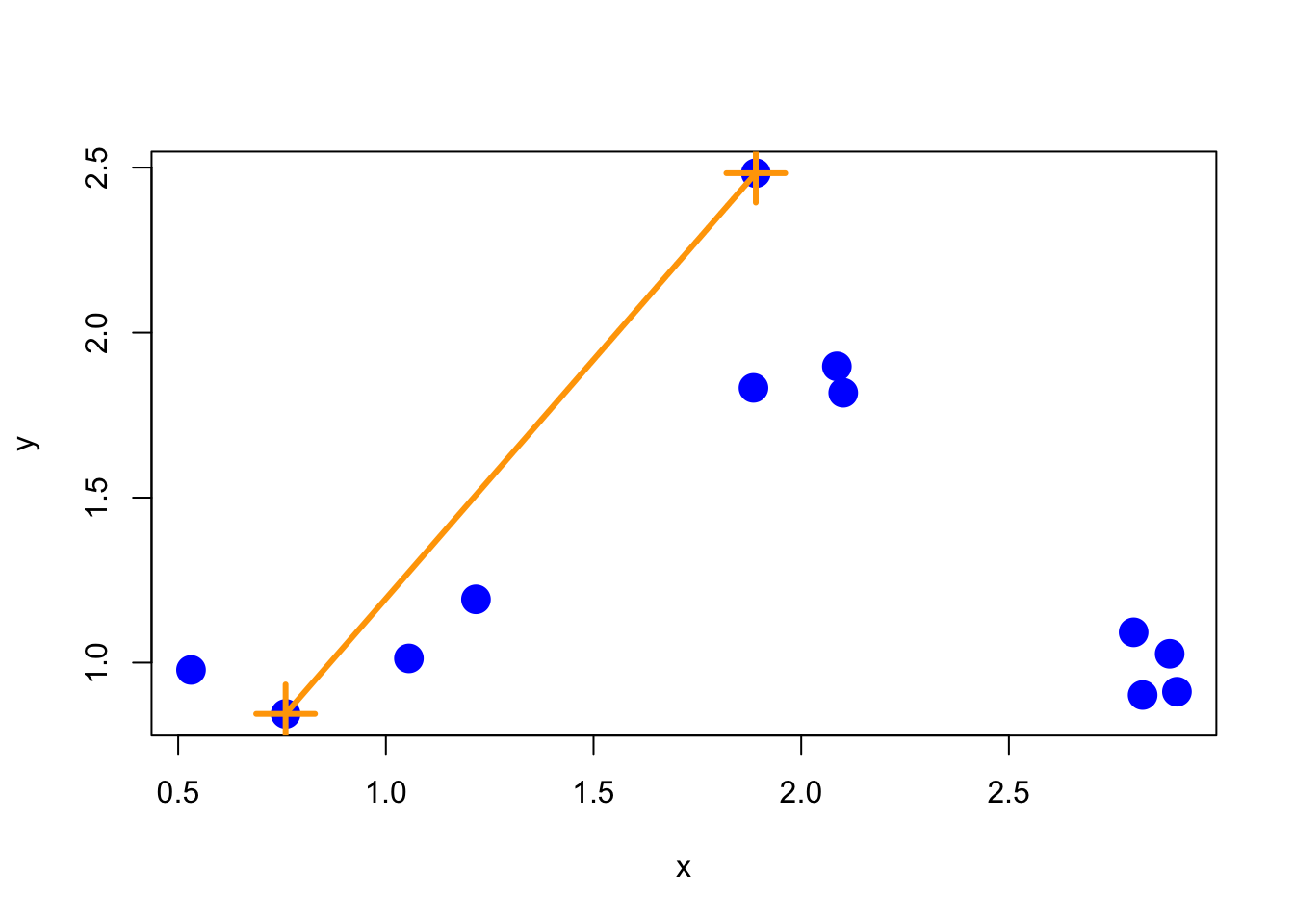
Figure 6.2: Complete merging
Complete merging is the default method in the hclust() function.
11.8 Merging points: Average
Another approach is average merging, which takes the average of the coordinate values in each group and measures the distance between these two averages. That approach is shown below.
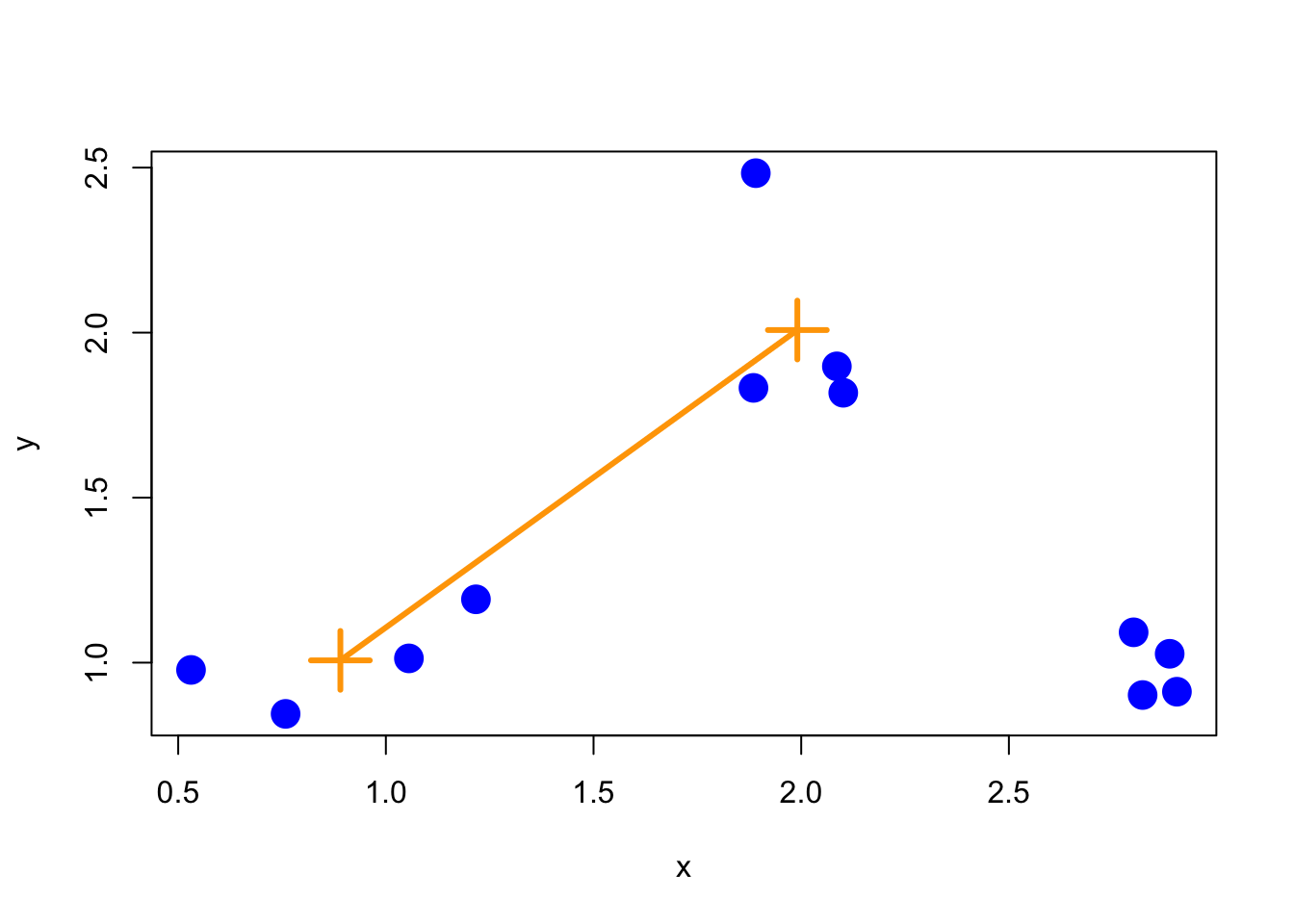
Figure 6.3: Average merging
While there’s not necessarily a correct merging approach for any given application, it’s important to note that the resulting tree/hierarchy that you get can be sensitive to the merging approach that you use.
11.9 Using the heatmap() function
The heatmap() function is a handy way to visualize matrix data. The basic idea is that heatmap() sorts the rows and columns of a matrix according to the clustering determined by a call to hclust(). Conceptually, heatmap() first treats the rows of a matrix as observations and calls hclust() on them, then it treats the columns of a matrix as observations and calls hclust() on those values. The end result is that you get a dendrogram associated with both the rows and columns of a matrix, which can help you to spot obvious patterns in the data.
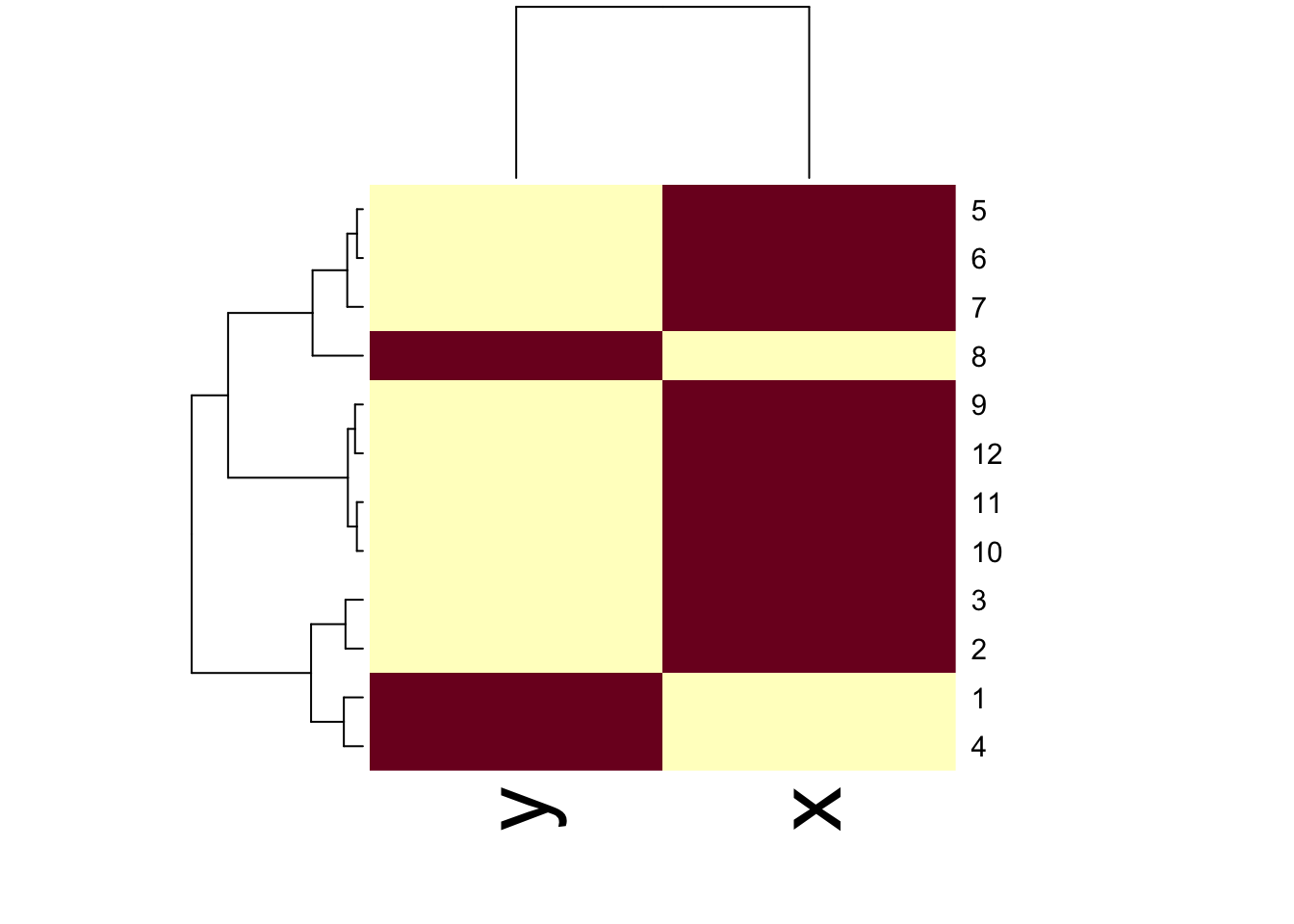
Figure 10.1: Heatmap with dendrograms on rows and columns
11.10 Notes and further resources
Hierarchical clustering is a really useful tool because it quickly gives you an idea of the relationships between variables/observations. But caution should be used with clustering as often the picture that you produce can be unstable. In particular, it may be sensitive to
Changing a few points in the dataset
Having different missing values in some of the observations
Picking a different distance metric (i.e. Euclidean vs. Manhattan)
Changing the merging strategy (i.e. complete vs. average)
Changing the scale of points for one variable
Another issue is that choosing where to “cut” the tree to determine the number of clusters isn’t always obvious. In light of some of these limitations, hierarchical clustering should be primarily used for exploration of data. Once major patterns have been identified, it’s often best to delve further with other tools and formal modeling.
Some other resources to check out: