TEMA 7: Sistemas de Ecuaciones
Clase 1: Introducción a los sistemas de ecuaciones
Un sistema de ecuaciones es una aplicación práctica de todo lo que hemos visto anteriormente. Por ejemplo, el sistema:
\[ \begin{cases} a_{11}x+a_{12}y=b_{1}\\ a_{21}x+a_{22}y=b_{2} \end{cases} \]
se puede escribir, mediante notación matricial, como:
\[ \left[\begin{array}{cc} a_{11} & a_{12}\\ a_{21} & a_{22} \end{array}\right]\left[\begin{array}{c} x_{1}\\ x_{2} \end{array}\right]=\left[\begin{array}{c} b_{1}\\ b_{2} \end{array}\right] \]
Donde tenemos:
- Una matriz (que llamaremos matriz de coeficientes)
\[ \mathbf{A}=\left[\begin{array}{cc} a_{11} & a_{12}\\ a_{21} & a_{22} \end{array}\right] \]
- Un vector de variables /incógnitas
\[ \overrightarrow{x}=\left[\begin{array}{c} x_{1}\\ x_{2} \end{array}\right] \]
- Un vector de términos independientes
\[ \overrightarrow{b}=\left[\begin{array}{c} b_{1}\\ b_{2} \end{array}\right] \]
- El uso del producto matricial, pudiendo escribir- de manera compacta- el sistema como
\[ \mathbf{A}\overrightarrow{x}=\overrightarrow{b} \]
Ejericio resuelto
Escribe el sistema anterior de tal forma que lo pongas como una combinación lineal de las columnas de la matriz \(\mathbf{A}\)? ¿Cómo será el vector \(\overrightarrow{b}\) con respecto al espacio \(Col(\mathbf{A})\)?
solución: El sistema podemos escribirlo como
\[ \left[\begin{array}{c} a_{11}\\ a_{21} \end{array}\right]x_{1}+\left[\begin{array}{c} a_{12}\\ a_{22} \end{array}\right]x_{2}=\left[\begin{array}{c} b_{1}\\ b_{2} \end{array}\right] \]
Si el sistema tiene solución, entonces, somos capaces de encontrar valores para \(x_{1},x_{2}\) de tal forma que \(\overrightarrow{b}\) está contenido en el espacio columna de \(\mathbf{A}.\) Es decir, si un sistema es resoluble, entonces \(\overrightarrow{b}{\subseteq Col(A)}\)
Por ejemplo, planteamos el siguiente sistema
\[ \left[\begin{array}{cc} -1 & 1\\ 2 & -1 \end{array}\right]\left[\begin{array}{c} x_{1}\\ x_{2} \end{array}\right]=\left[\begin{array}{c} -0.5\\ 1.5 \end{array}\right] \]
Pero también lo puedes ver como una combinación lineal de las columnas de la matriz de coeficientes \(\mathbf{A}\)
\[ x_{1}\left[\begin{array}{c} -1\\ 2 \end{array}\right]+x_{2}\left[\begin{array}{c} 1\\ -1 \end{array}\right]=\left[\begin{array}{c} -0.5\\ 1.5 \end{array}\right], \]
entonces, diremos que el sistema tiene solución si somos capaces de encontrar los valores de \(x_{1}\)y \(x_{2}\) que permiten que el vector \(\left[\begin{array}{c} -0.5\\ 1.5 \end{array}\right]\)
esté generado por la combinación lineal propuesta. Veámoslo gráficamente
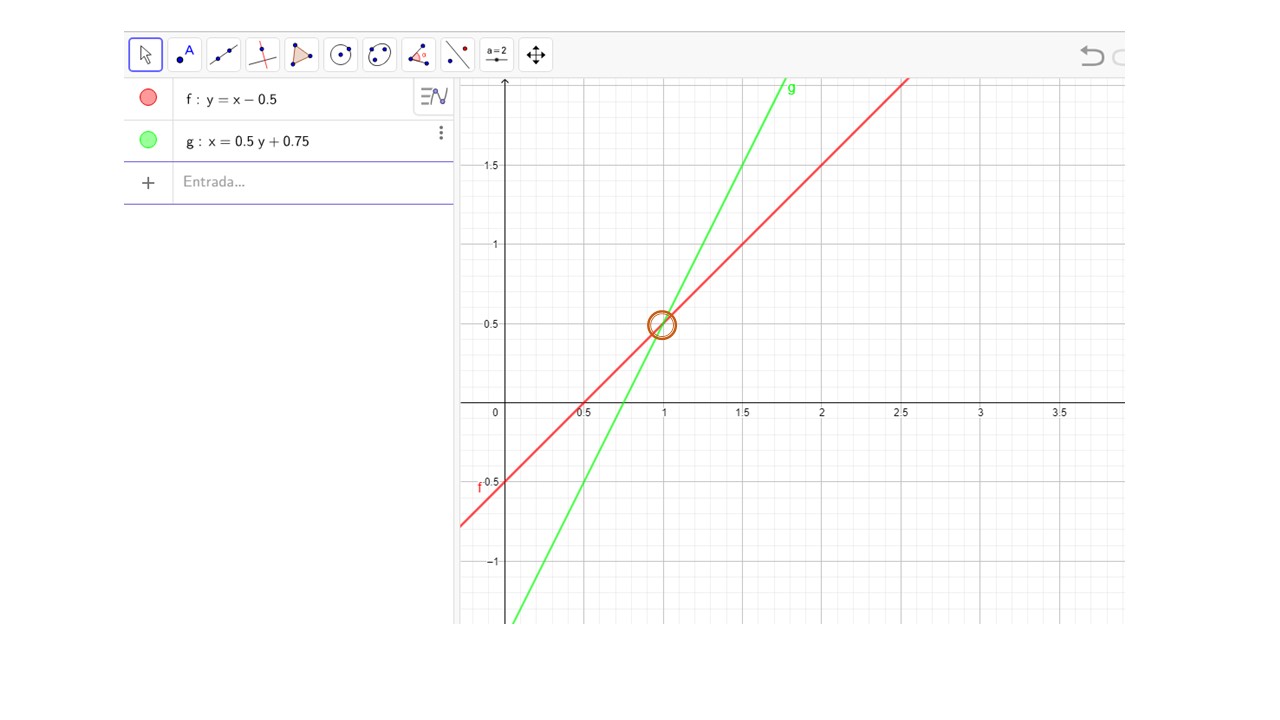
FIG1:Dibujamos las dos rectas en \(\mathbb{R}^{2}\) que dan lugar al sistema \[ \begin{cases} x_{2}=x_{1}-0.5\\ x_{1}=\frac{1}{2}x_{2}+0.75 \end{cases}\]
En este caso, la solución es un punto, es decir,
\[ \overrightarrow{x}=\left[\begin{array}{c} 1\\ 0.5 \end{array}\right], \]
que, sustituyendo en el sistema
\[ \left[\begin{array}{c} -1\\ 2 \end{array}\right]\times 1+\left[\begin{array}{c} 1\\ -1 \end{array}\right]\times 0.5=\left[\begin{array}{c} -0.5\\ 1.5 \end{array}\right] \]
Es decir, la única forma que tenemos de que el vector \(\left[\begin{array}{c} -0.5\\ 1.5 \end{array}\right]\) pertenezca al espacio de las columnas de la matriz de coeficientes \(\mathbf{A}\) es asignando \(x_{1}=1,x_{2}=0.5.\) Decimos que, cuando la solución es un punto el sistema es COMPATIBLE DETERMINADO (compatible es que tiene solución y determinado que esta es única). Si tuviéramos infinitas soluciones, lo llamaríamos compatible indeterminado (es decir, tiene solución, pero son infinitas) y si no tiene solución: incompatible. Geométricamente, representan:
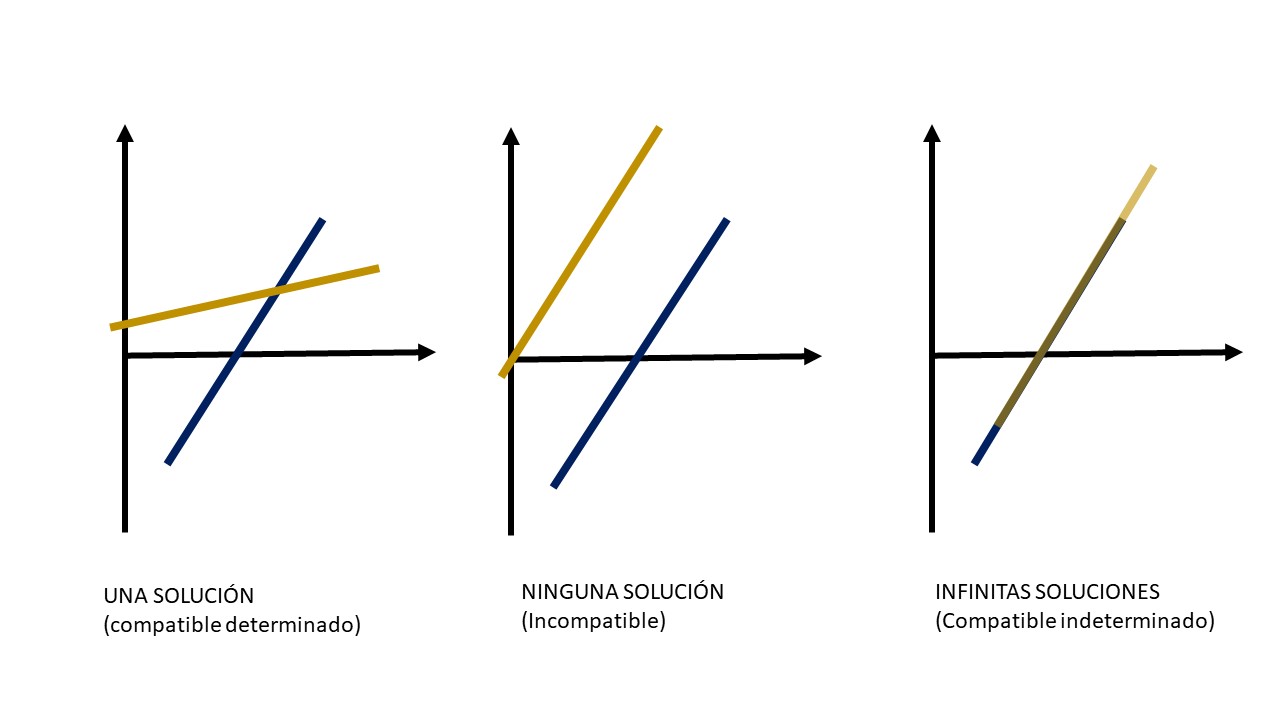
FIG2: Distintos tipos de soluciones
Ejercicio resuelto
Escribe dos sistemas: uno que sea compatible indeterminado y, a partir de este, modifícalo para que sea incompatible. Explica cómo lo has hecho.
Es muy fácil construir un sistema que cumpla con ciertas características. Por ejemplo, partimos de la ecuación \[ 2x+3y=4 \]
si queremos que sea compatible indeterminado, deberemos hacer que esta recta sea proporcional . Por ejemplo, la podemos multiplicar por 3: \[ \begin{cases} 2x+3y=4\\ 6x+9y=12 \end{cases} \]
En realidad, ambas ecuaciones están dando la misma información.
Si queremos que sea incompatible, entonces partiremos de caulquiera de las dos ecuaciones anteriores y diremos algo que sea imposible. Por ejemplo, \[ \begin{cases} 2x+3y=4\\ 6x+9y=11 \end{cases} \]
No puede ocurrir que, si una ecuación es el triple que la otra, la suma no dé el triple. Esto es imposible y, por lo tanto, se dice que es incompatible.
Ahora, una pregunta
¿Cómo escribimos cualquier sistema, general, en forma matricial? ¿cuáles han de ser sus dimensiones?
\[ \underset{\left[\begin{array}{cccc} a_{11} & a_{12} & ... & a_{1n}\\ a_{21} & a_{22} & ... & a_{2n}\\ ... & ... & ... & ...\\ a_{m1} & a_{m2} & ... & a_{mn} \end{array}\right]}{\mathbf{A}}\underset{\left[\begin{array}{c} x_{1}\\ x_{2}\\ ...\\ x_{n} \end{array}\right]}{\overrightarrow{x}}=\underset{\left[\begin{array}{c} b_{1}\\ b_{2}\\ ...\\ b_{m} \end{array}\right]}{\overrightarrow{b}} \]
Donde definimos:
- \(\mathbf{A}\) matriz de coeficientes \(\mathbf{A}\in\mathcal{M}_{m\times n}\)
- \(\overrightarrow{x}\) vector de incógnitas \(\overrightarrow{x}\in\mathcal{M}_{n\times1}\)
- \(\overrightarrow{b}\) vector de término independiente \(\overrightarrow{b}\in\mathcal{M}_{m\times1}\)
Importante: si \(\overrightarrow{b}=\left[\begin{array}{c} 0\\ 0\\ ...\\ 0 \end{array}\right]\), decimos que el sistema es ``homogéneo’’.
Otro ejemplo que puede visualizarse es un sistema de tres ecuaciones con tres incógnitas. Nota que, en realidad, tienes tres ecuaciones cartesianas de tres planos en \(\mathbb{R}^{3}\)
\[ \left[\begin{array}{ccc} a_{11} & a_{12} & a_{13}\\ a_{21} & a_{22} & a_{23}\\ a_{31} & a_{32} & a_{33} \end{array}\right]\left[\begin{array}{c} x_{1}\\ x_{2}\\ x_{3} \end{array}\right]=\left[\begin{array}{c} b_{1}\\ b_{2}\\ b_{3} \end{array}\right] \]
Nada nos asegura que el sistema tenga solución, incluso que sea única. De hecho, se pueden presentar diferentes casos, como puedes ver en la siguiente figura.
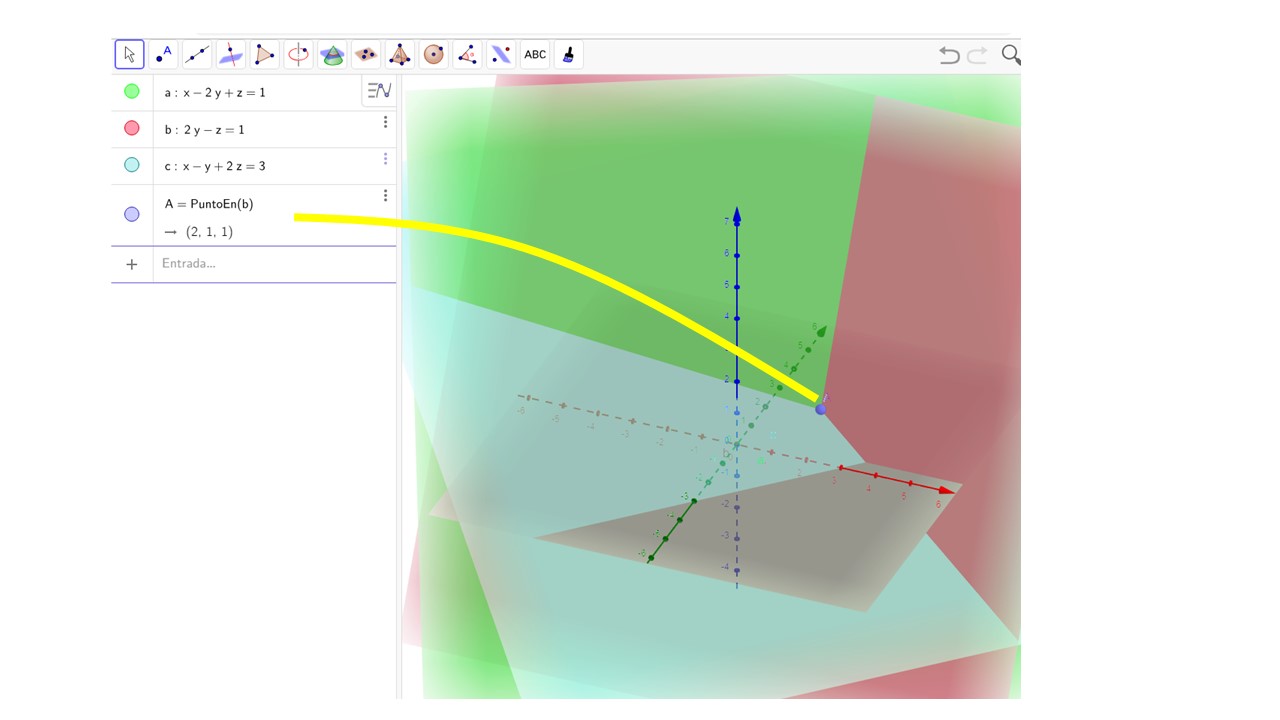
FIG3: El sistema tiene una única solución
Por ejemplo:
\[ \left[\begin{array}{ccc} 1 & -2 & 1\\ 0 & 2 & -1\\ 1 & -1 & 2 \end{array}\right]\left[\begin{array}{c} x_{1}\\ x_{2}\\ x_{3} \end{array}\right]=\left[\begin{array}{c} 1\\ 1\\ 3 \end{array}\right] \]
Como ves, la solución viene dada por un punto en \(\mathbb{R}^3\). Diremos, entonces, que el conjunto solución es:
\[ Sol=\left\{ \left(2,1,1\right)\right\} , \]
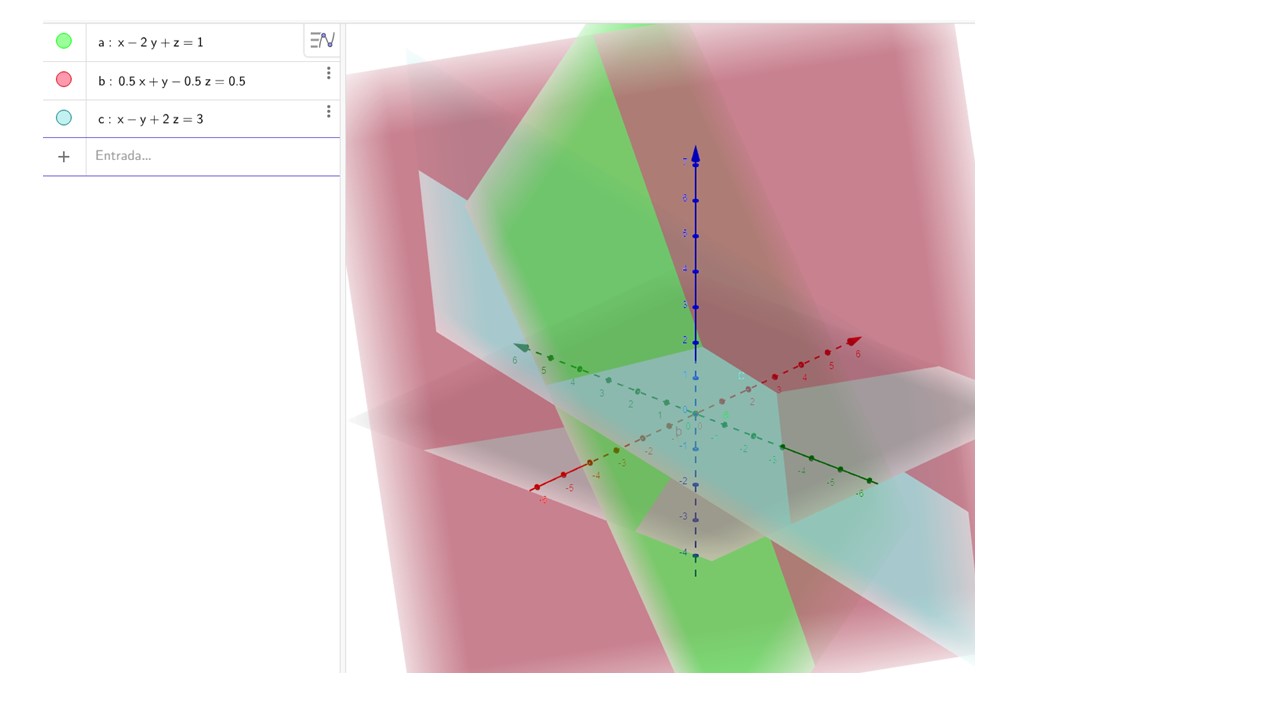
FIG4: El sistema tiene infinitas soluciones
Por ejemplo,
\[ \left[\begin{array}{ccc} 1 & -2 & 1\\ {\color{red}{0.5}} & {\color{red}{-1}} & {\color{red}{0.5}}\\ 1 & -1 & 2 \end{array}\right]\left[\begin{array}{c} x_{1}\\ x_{2}\\ x_{3} \end{array}\right]=\left[\begin{array}{c} 1\\ {\color{red}{0.5}}\\ 3 \end{array}\right] \]
fíjate, para conseguir un sistema compatible indeterminado, hemos hecho que la segunda ecuación se construya con la primera dividida por 2: esto es, una de las dos ecuaciones “sobra” puesto que no aporta información.
En este caso, la solución es un conjunto de puntos que da lugar a una recta. Ya sabes, del primer capítulo, que una recta en \(\mathbb{R}^3\) se construye con dos ecuaciones cartesianas
\[ \begin{cases} x_{1}-2x_{2}+x_{3}=1\\ x_{1}-x_{2}+2x_{3}=3 \end{cases} \]
podemos tener, enseguida, la solución como ya sabes del primer capítulo:
Obtengo la recta que representan estas ecuaciones cartesianas del plano
Hago \(x_{3}={{\lambda}}\), entonces, si restas las ecuaciones, obtienes \(x_{2}=2-\lambda\) y, si sustituyes, obtienes \(x_{1}=5-3\lambda\). Entonces, la solución de este sistema resulta ser \[ \left[\begin{array}{c} x_{1}\\ x_{2}\\ x_{3} \end{array}\right]=\left[\begin{array}{c} 5\\ 2\\ 0 \end{array}\right]+\lambda\left[\begin{array}{c} -3\\ -1\\ 1 \end{array}\right] \]
que es una recta en \(\mathbb{R}^{3}\). El conjunto solución se dice que es: \[ Sol=\left\{ \overrightarrow{x}\in\mathbb{R}^{3}\::\:\left[\begin{array}{c} x_{1}\\ x_{2}\\ x_{3} \end{array}\right]=\left[\begin{array}{c} 5\\ 2\\ 0 \end{array}\right]+\lambda\left[\begin{array}{c} -3\\ -1\\ 1 \end{array}\right]\right\} \]
Si miras con más atención el dibujo, donde incluimos la recta que representa el conjunto solución:
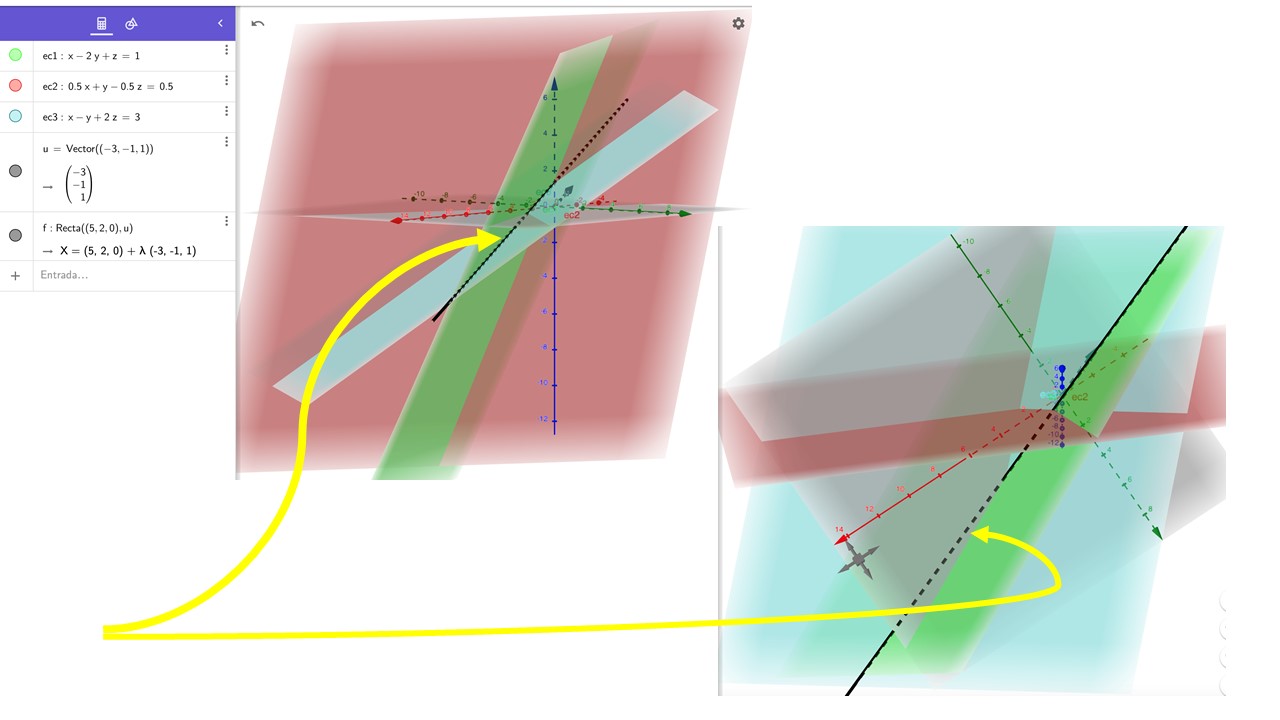
FIG5: La recta que conforma la solución al sistema
Y, finalmente, cuando el sistema no tiene solución:
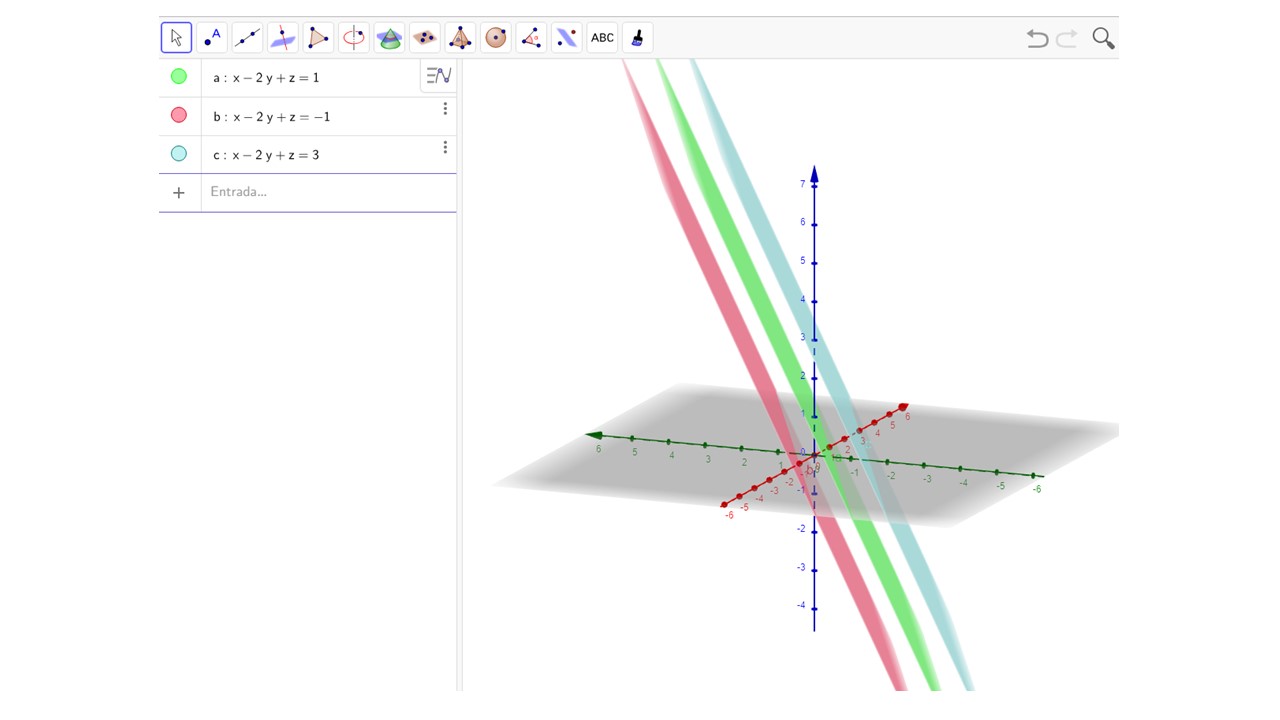
FIG6: La recta que conforma la solución al sistema
\[ \left[\begin{array}{ccc} {\color{lime}1} & {\color{lime}{-2}} & {\color{lime}1}\\ {\color{red}1} & {\color{red}{-2}} & {\color{red}1}\\ {\color{blue}1} & {\color{blue}{-2}} & {\color{blue}1} \end{array}\right]\left[\begin{array}{c} x_{1}\\ x_{2}\\ x_{3} \end{array}\right]=\left[\begin{array}{c} {\color{lime}1}\\ {\color{red}{-1}}\\ {\color{blue}3} \end{array}\right] \]
como ves, escribimos en la parte izquierda los mismos coeficientes para las ecuaciones cartesianas de los planos pero, en la parte izquierda, ponemos diferentes valores para el término independiente. Esto da lugar a la FIG 6, donde los planos son paralelos: no hay intersección posible.